
VEX V5 Ball Launcher

Robotcapaciteiten
De VEX V5 Ball Launcher bevat een Vision-sensor die boven de robot is gemonteerd, met een neerwaartse hoek. Deze robot kan worden geprogrammeerd om te draaien totdat de Vision Sensor een gekleurde bal detecteert en er vervolgens naar toe rijdt. Wanneer de Vision Sensor detecteert dat de robot dicht genoeg bij de bal is, kan de robot de bal via de inlaat naar binnen trekken en vervolgens op een doelwit of doel schieten.
Deze build is niet mogelijk zonder de Vision Sensor, maar de Vision Sensor is niet speciaal voor deze build gemaakt. Het was al een technologisch apparaat dat op een innovatieve manier in het ontwerp van deze robot werd verwerkt.
![]() Breid uw leerproces uit
Breid uw leerproces uit
U kunt deze activiteit uitbreiden door uw leerlingen te vragen de verschillende hulpstukken of ontwerpelementen te benoemen en te benoemen die in het ontwerp van de V5 Ball Launcher zijn verwerkt.
Concurrentieverbinding - Keerpunt
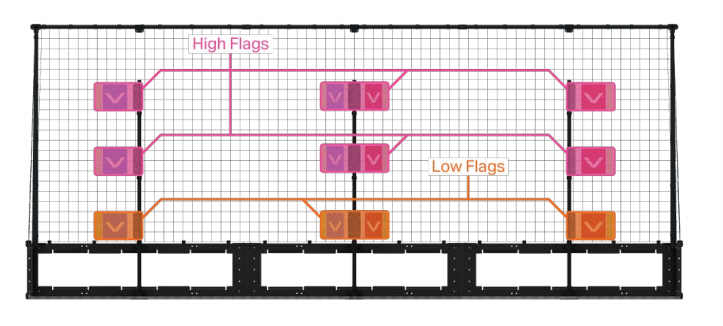
Het ontwerpen van een draagraket voor een robot is vooral handig in een wedstrijdomgeving. Voor de VEX Robotics Competition van 2018-2019, spelTurning Pointmoesten spelers vlaggen omwisselen. Er waren in totaal negen vlaggen: drie onderste vlaggen die door de robot konden worden omgedraaid, en de zes hoge vlaggen die alleen konden worden omgedraaid door er met wedstrijdbalstukken op te slaan.
Daarom moesten wedstrijdteams een ballenwerper ontwerpen die de bal hoog en hard genoeg zou lanceren om de vlaggen om te draaien. Als de bal te hard of niet hard genoeg op een vlag is geschoten, schakelt de vlag mogelijk niet goed. De draagraket zou ook de capaciteit nodig hebben om verschillende balspelstukken tijdens de wedstrijd te lanceren. Er waren in totaal zes vlaggen die moesten worden omgeschakeld. Als de robot slechts de capaciteit had om twee ballen te lanceren of om onbeperkt ballen te lanceren, maar slechts met een snelheid van één bal per keer, heeft de robot mogelijk niet genoeg tijd in de wedstrijd om alle zes te schakelen. Sommige game-winnende ontwerpen bevatten robots die op een efficiënte manier meer dan één bal tegelijk konden lanceren.
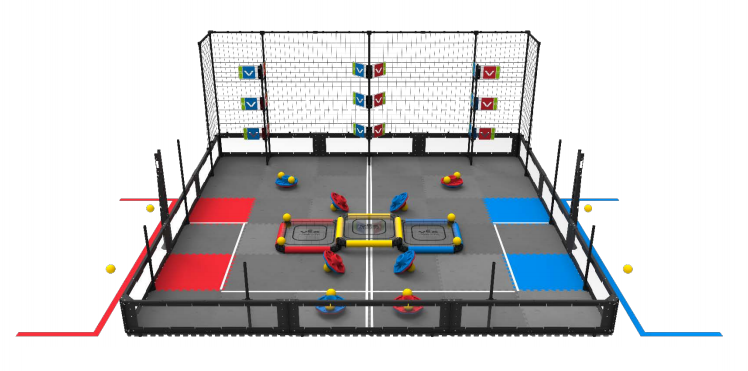
Het ontwerpen en bouwen van een lanceerhulpstuk voor dit spel was noodzakelijk, zodat de robot de gele balspelstukken kon oppakken en op de vlaggen kon schieten om tussen de rode en blauwe teamkleuren te schakelen om punten te behalen.
![]() Motiveren Discussie
-
Overwegen van het ontwerp van een robot
Motiveren Discussie
-
Overwegen van het ontwerp van een robot
Elk jaar introduceert de VEX Robotics Competition een nieuw spel. De video waarin de VEX Robotics Competition Tower Takeover: 2019 - 2020 VRC Game wordt gepresenteerd, is te vinden via deze link. De video voor de wedstrijd van dit jaar vindt udezedoor te klikken op Game Video.
Bekijk samen de video voor de doelstellingen van het huidige spel en vóór de volgende bespreking.
V:Welke vaardigheden heeft een robot nodig om goed te presteren in de wedstrijd van dit jaar?
A:De antwoorden zullen variëren, maar leerlingen zullen misschien eerst reageren met de basis: een autonoom programma, snel kunnen rijden en draaien, enz.
V:Welke vaardigheden, kenmerken of hulpstukken heeft een robot nodig om het spel van dit jaar te winnen?
A:Afhankelijk van het spel kunnen antwoorden met betrekking tot kenmerken en hulpstukken het volgende omvatten: een katapultontwerp, een katapultontwerp, een transportbandontwerp en/of een vliegwielontwerp. Antwoorden die betrekking hebben op vaardigheden kunnen bijvoorbeeld zijn: het snel en nauwkeurig kunnen oppakken, loslaten of voortbewegen van spelelementen (petten, kubussen, vlaggen, ballen, etc.).
![]() Breid uw leerproces uit
-
Bijlagen ontwerpen
Breid uw leerproces uit
-
Bijlagen ontwerpen
Bij het ontwerpen van hulpstukken voor een robot is het een goed idee om te kijken wat anderen hebben gemaakt en succesvol hebben gevonden.
Laat leerlingen de hulpstukken onderzoeken en functies bouwen die anderen hebben gemaakt.
De beste plek om inspiratie op te doen is het ForumvanVEX. U kunt in het forum zoeken met termen als 'bijlage' of specifiekere termen die betrekking hebben op het type ontwerp waarin u geïnteresseerd bent. Als ze op zoek zijn naar meer algemene inspiratie, kunnen ze in elke zoekmachine voor afbeeldingen zoeken naar "VEX V5 robot" of vergelijkbare zoektermen. Die leveren veel afbeeldingen op die als inspiratiebron kunnen dienen.
Laat de leerlingen een type bijlage of ontwerpkenmerk kiezen om te onderzoeken en twee of drie inspirerende voorbeelden te vinden. Laat ze de ideeën in deze voorbeelden verwerken in een plan voor hun robot voor de wedstrijd van dit jaar.