

Capacidades do Robô
O lançador de bolas VEX V5 inclui um sensor de visão montado acima do robô, inclinado para baixo. Este robô pode ser programado para rodar até que o Sensor de Visão detete uma bola colorida e depois dirigir-se para ela. Quando o Sensor de Visão deteta que o robô está suficientemente perto da bola, o robô pode puxá-la usando a sua entrada e, em seguida, lançá-la para um alvo ou baliza.
Esta compilação não é possível sem o Sensor de Visão, mas o Sensor de Visão não foi criado para esta compilação. Era já um dispositivo tecnológico que foi incorporado no design deste robô de forma inovadora.
![]() Amplie o seu aprendizado
Amplie o seu aprendizado
Para expandir esta atividade, peça aos seus alunos que identifiquem e rotulem os diferentes acessórios ou elementos de design incorporados no design do lançador de bolas V5.
Ligação com a Competição - Ponto de Viragem
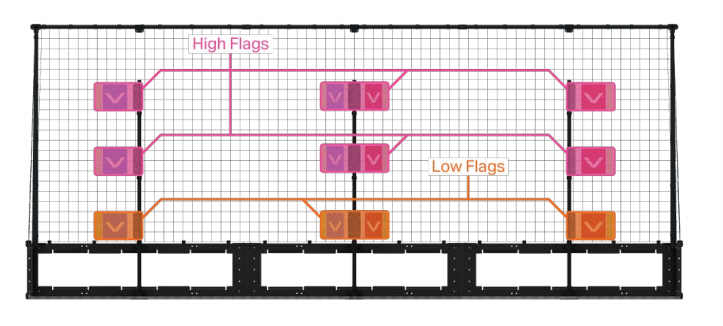
Conceber um lançador para um robô é especialmente útil num ambiente de competição. O jogo Turning Point da VEX Robotics Competition 2018 - 2019 exigia que os jogadores alternassem as bandeiras. Havia nove bandeiras no total: três bandeiras inferiores que podiam ser acionadas pelo robô e as seis bandeiras altas que só podiam ser acionadas atingindo-as com peças de jogo de bola de competição.
Assim sendo, as equipas de competição necessitavam de conceber um lançador de bola que lançasse a bola alto e com força suficiente para movimentar as bandeiras. Se a bola foi atirada contra uma bandeira com demasiada força ou não o suficiente, a bandeira pode não alternar corretamente. O lançador também necessitaria da capacidade de lançar diferentes peças do jogo durante a partida. Havia seis bandeiras no total que tinham de ser alternadas. Se o robô só tivesse capacidade para lançar duas bolas ou lançar bolas ilimitadas, mas apenas na proporção de uma bola de cada vez, o robô poderia não ter tempo suficiente na partida para alternar todas as seis. Alguns designs vencedores de jogos incluíam robôs que podiam lançar mais do que uma bola ao mesmo tempo de forma eficiente.
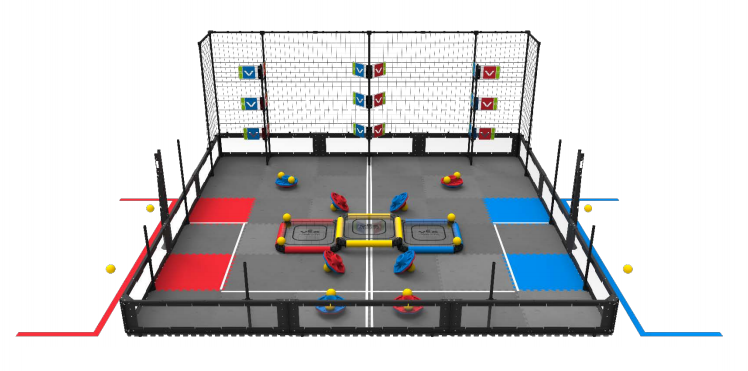
Desenhar e construir um lançador para este jogo foi necessário para que o robô pudesse apanhar as peças da bola amarela e disparar sobre as bandeiras para alternar entre as cores vermelha e azul da equipa para obter pontos.
![]() Motivar a discussão
-
Considerando o projeto de um robô
Motivar a discussão
-
Considerando o projeto de um robô
Todos os anos, a VEX Robotics Competition apresenta um novo jogo. O vídeo que apresenta o VEX Robotics Competition Tower Takeover: 2019 - 2020 VRC Game pode ser encontrado neste link. O vídeo do jogo do ano em curso pode ser encontrado na parte inferior de neste link clicando em Vídeo do Jogo.
Reveja o vídeo para conhecer os objetivos do jogo atual em conjunto e antes da discussão que se segue.
P: Que competências precisa um robô para ter um bom desempenho no jogo deste ano?
R: As respostas variam, mas os alunos podem responder primeiro com o básico: um programa autónomo, a capacidade de conduzir e fazer curvas rapidamente, etc.
P: De que competências, características ou acessórios necessita um robô para vencer o jogo deste ano?
A: Dependendo do jogo, as respostas relacionadas com as características e acessórios podem incluir o design da catapulta, o design da fisga, o design da correia transportadora e/ou o design do volante. As respostas relacionadas com as habilidades podem incluir a capacidade de agarrar, largar ou impulsionar elementos do jogo (bonés, cubos, bandeiras, bolas, etc.) de forma rápida e precisa.
![]() Amplie a sua aprendizagem
-
Desenhar anexos
Amplie a sua aprendizagem
-
Desenhar anexos
Ao projetar acessórios para um robô, é uma boa prática ver o que outros criaram e consideraram bem-sucedido.
Peça aos alunos que investiguem os anexos e que construam recursos que outros criaram.
O melhor lugar para encontrar inspiração é no Fórumda VEX. O fórum pode ser pesquisado utilizando termos como “anexo” ou termos mais específicos relacionados com o tipo de design que estão interessados em utilizar. Se quiserem uma inspiração mais geral, “VEX V5 robot” ou termos de pesquisa semelhantes em qualquer motor de pesquisa de imagens devolverão muitas imagens que podem servir como fontes de inspiração.
Peça aos alunos que escolham um tipo de acessório ou recurso de design para investigar e que encontrem dois ou três exemplos inspiradores. Peça-lhes que integrem as ideias destes exemplos num plano para o seu robô para a competição deste ano.