

Robotin ominaisuudet
VEX V5 Ball Launcher sisältää näkösensorin, joka on asennettu robotin yläpuolelle kulmassa alaspäin. Tämä robotti voidaan ohjelmoida kääntymään, kunnes Vision Sensor havaitsee värillisen pallon, ja ajaa sitten sitä kohti. Kun Vision Sensor havaitsee, että robotti on tarpeeksi lähellä palloa, robotti voi vetää sen sisään imuaukkollaan ja ampua sen sitten ulos maaliin tai maaliin.
Tämä koontiversio ei ole mahdollinen ilman Vision Sensoria, mutta Vision Sensoria ei luotu tätä koontiversiota varten. Se oli jo teknologinen laite, joka sisällytettiin tämän robotin suunnitteluun innovatiivisella tavalla.
![]() Laajenna oppimistasi
Laajenna oppimistasi
Laajenna tätä toimintaa pyytämällä oppilaitasi tunnistamaan ja merkitsemään V5 Ball Launcherin suunnitteluun sisältyvät erilaiset liitteet tai suunnitteluelementit.
Kilpailuyhteys - käännekohta
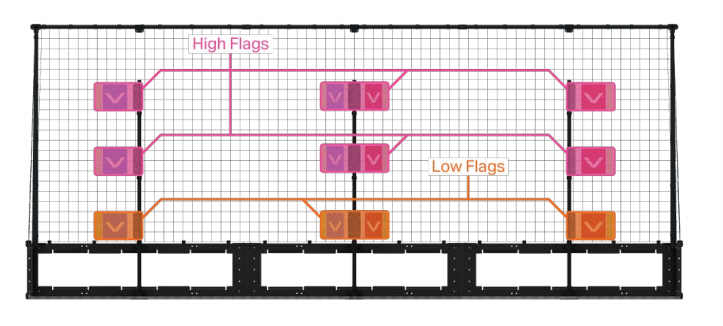
Kantoraketin suunnittelu robotille on erityisen hyödyllistä kilpailutilanteessa. 2018 - 2019 VEX Robotics Competition -peli Turning Point vaati pelaajia vaihtamaan lippuja. Lippuja oli kaikkiaan yhdeksän: kolme alalippua, joita robotti saattoi vaihtaa, ja kuusi korkeaa lippua, joita voitiin vaihtaa vain lyömällä niitä kilpailupallon nappuloilla.
Siksi kilpailujoukkueiden piti suunnitella pallonheitin, joka laukaisi pallon korkealle ja tarpeeksi kovaa lippujen vaihtamiseksi. Jos palloa ammuttiin lippua vasten liian kovaa tai ei tarpeeksi kovaa, lippu ei ehkä käänny kunnolla. Laukaisulaite tarvitsisi myös kyvyn laukaista erilaisia pallopelin nappuloita ottelun aikana. Lippuja oli yhteensä kuusi, jotka piti vaihtaa. Jos robotilla oli kyky laukaista vain kaksi palloa tai laukaista rajattomasti palloja, mutta vain yhden pallon nopeudella kerrallaan, robotilla ei ehkä ole tarpeeksi aikaa ottelussa vaihtaa kaikkia kuutta. Joihinkin pelien voittomalleihin sisältyi robotteja, jotka pystyivät laukaisemaan useamman kuin yhden pallon kerrallaan tehokkaasti.
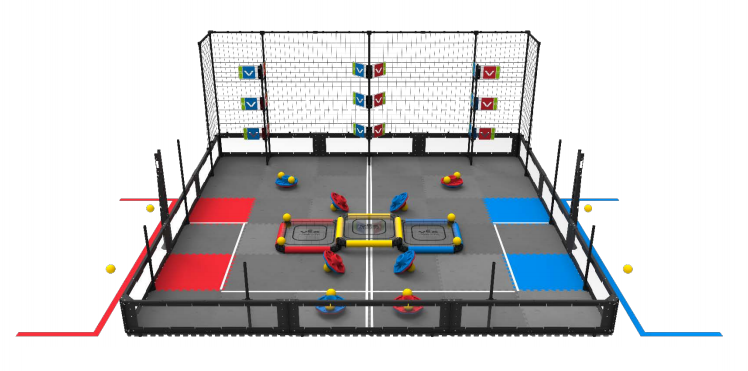
Laukaisimen liitteen suunnittelu ja rakentaminen tähän peliin oli tarpeen, jotta robotti pystyi poimimaan keltaiset pallopelin nappulat ja ampumaan niitä lippuihin vaihtaakseen punaisen ja sinisen joukkuevärin välillä saadakseen pisteitä.
![]() Motivoi keskustelua
-
Pohditaan robotin suunnittelua
Motivoi keskustelua
-
Pohditaan robotin suunnittelua
Joka vuosi VEX Robotics Competition esittelee uuden pelin. VEX Robotics Competition Tower Takeover: 2019 - 2020 VRC Gamen esittelyvideo löytyy tästä linkistä. Kuluvan vuoden pelin video löytyy tämän linkin alaosasta klikkaamalla Pelivideo.
Katsokaa video nykyisen pelin tavoitteista yhdessä ja ennen seuraavaa keskustelua.
K: Mitä kykyjä robotti tarvitsee menestyäkseen hyvin tämän vuoden pelissä?
A: Vastaukset vaihtelevat, mutta opiskelijat voivat ensin vastata perusasioista: autonominen ohjelma, kyky ajaa ja kääntyä nopeasti jne.
K: Mitä kykyjä, ominaisuuksia tai lisälaitteita robotti tarvitsee voittaakseen tämän vuoden pelin?
A: Pelistä riippuen ominaisuuksiin ja lisävarusteisiin liittyvät vastaukset voivat sisältää katapultti-, ritsa-, kuljetinhihna- ja/tai vauhtipyörämallin. Kykyihin liittyvät vastaukset voivat sisältää kyvyn poimia, vapauttaa tai ajaa pelin elementtejä (korkit, kuutiot, liput, pallot jne.) nopeasti ja tarkasti.
![]() Laajenna oppimistasi
-
Liitteiden suunnittelu
Laajenna oppimistasi
-
Liitteiden suunnittelu
Kun suunnitellaan lisälaitteita robotille, on hyvä käytäntö nähdä, mitä muut ovat luoneet ja todenneet onnistuneeksi.
Pyydä oppilaita tutkimaan muiden luomia liitteitä ja rakentamaan ominaisuuksia.
Paras paikka löytää inspiraatiota on VEXin foorumi. Foorumilla voi hakea termeillä, kuten "liite" tai tarkemmilla termeillä, jotka liittyvät siihen, millaista suunnittelua he ovat kiinnostuneita käyttämään. Jos he haluavat yleisempää inspiraatiota, "VEX V5 robotti" tai vastaavat hakutermit missä tahansa kuvahakukoneessa palauttavat monia kuvia, jotka voisivat toimia inspiraation lähteinä.
Pyydä oppilaita valitsemaan kiinnitystyyppi tai suunnitteluominaisuus tutkiakseen ja löytämään kaksi tai kolme inspiroivaa esimerkkiä. Pyydä heitä yhdistämään näissä esimerkeissä olevat ideat robottinsa suunnitelmaan tämän vuoden kilpailua varten.