
Programmazione basata sugli eventi: comunicazione tra blocchi
![]() Toolbox per l'insegnante
-
Lo scopo di questa sezione
Toolbox per l'insegnante
-
Lo scopo di questa sezione
L'obiettivo della sezione Ripensa è far sì che gli studenti utilizzino i pulsanti del Controller mediante la programmazione basata sugli eventi.
Questa sezione include:
- Panoramica della programmazione basata sugli eventi
- Esempio di istruzioni per il download del progetto & Panoramica
- Attività di remix:
- Attività A: Prendi gli oggetti e rimettili in un posto!
- Attività B: impila gli oggetti!
- Attività C: Corsa a staffetta
- Domande sul remix
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
- Per risparmiare tempo, è possibile associare il controller al Robot Brain prima della lezione. Decidi se vuoi completare questo passaggio o se vuoi che lo facciano gli studenti. Segui i passaggi qui. Se vuoi che associno il Controller al Brain, puoi stampare questo articolo affinché gli studenti possano utilizzarlo.
- La programmazione basata sugli eventi conferisce al Clawbot la capacità di attivare eventi o di reagire a trigger. Questo tipo di programmazione consente a un blocco di comunicare con altri blocchi.
In altre parole, il Clawbot risponde ai movimenti dei joystick del controller. Il movimento del joystick è il grilletto e il Clawbot risponde di conseguenza.
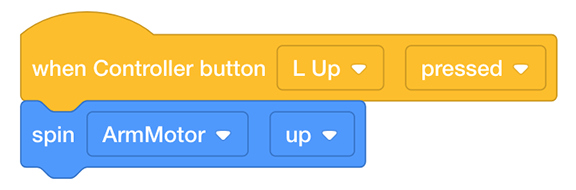
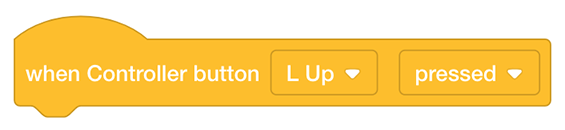
Nell'esempio sopra, premendo il pulsante L si attiva il grilletto che fa girare ArmMotor. Il blocco {When Controller button} comunica tale messaggio al blocco [Spin]. Clicca qui (Google / .docx / .pdf) per saperne di più su questi blocchi e su come vengono utilizzati nel progetto di esempio Clawbot Control.
![]() Toolbox per l'insegnante
-
Ripensare i ruoli degli studenti
Toolbox per l'insegnante
-
Ripensare i ruoli degli studenti
All'inizio della sezione Ripensa, dividi gli studenti nei loro gruppi e chiedi loro di scegliere i loro ruoli. Per un ripasso sui ruoli e suggerimenti per facilitare i gruppi, clicca qui sotto.

Programmazione basata sugli eventi
Se il tuo cane ti porta il guinzaglio o si siede vicino alla porta, ti sta facendo sapere che deve uscire. A scuola, quando l'insegnante ti fa una domanda e ti vede alzare la mano, sa che credi di sapere la risposta e che vorresti rispondere alla domanda. Questi comportamenti sono anche noti come "fattori scatenanti".
Il tuo cane sa che portarti il guinzaglio o sedersi vicino alla porta è il fattore scatenante che ti fa sapere che deve uscire. Quindi, quando lo vedi seduto vicino alla porta con il guinzaglio, reagisci allo stimolo portandolo fuori. Alzare la mano è il modo per far capire all'insegnante che vorresti rispondere alla sua domanda. L'insegnante reagisce quindi all'innesco chiamandoti.
La programmazione basata sugli eventi in robotica si verifica quando determinati comportamenti del robot attivano il robot affinché faccia determinate cose o reagisca a determinati inneschi.
Per saperne di più sulla programmazione basata sugli eventi, guarda il nostro tutorial sugli eventi cliccando su Esercitazioni nella barra degli strumenti e selezionando il tutorial Eventi.

![]() Toolbox per l'insegnante
-
Rivedere i blocchi
Toolbox per l'insegnante
-
Rivedere i blocchi
- Come attività per l'intera classe, rivedere i blocchi di programmazione con gli studenti. Informa gli studenti che è possibile attivare contemporaneamente più eventi all'interno del progetto Clawbot Control, consentendo loro di controllare il movimento di guida del Clawbot, nonché il movimento del braccio e dell'artiglio del Clawbot.
- Se gli studenti hanno bisogno di un rapido ripasso di VEXcode IQ, possono fare riferimento ai Tutorial in qualsiasi momento durante questa indagine. I tutorial si trovano nella barra degli strumenti. Grazie ai tutorial, gli studenti possono rivedere come salvare, scaricare ed eseguire un progetto, insieme ad altri elementi.

Controllore: Controllo Clawbot
Ora sei pronto per scaricare il progetto di esempio e utilizzare il Controller per azionare il Clawbot, il suo braccio e il suo artiglio, tutto contemporaneamente!
Il costruttore di ogni gruppo dovrebbe procurarsi l'hardware necessario. Il verbalizzatore dovrebbe ricevere il quaderno di ingegneria del gruppo. Il programmatore dovrebbe aprire VEXcode IQ.
| Quantità | Materiali necessari |
|---|---|
| 1 |
Artigliobot |
| 1 |
Batteria del robot carica |
| 1 |
Radio VEX IQ |
| 1 |
Controllore |
| 1 |
Cavo di ancoraggio |
| 1 |
QI codice VEX |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Quaderno di ingegneria |
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
Assicuratevi che ogni gruppo di studenti abbia tutto il materiale necessario.
-
Simulare per gli studenti ciascuna delle fasi di risoluzione dei problemi. Ricordate agli studenti che in ogni gruppo c'è qualcuno che svolge il ruolo di costruttore. Quella persona dovrebbe controllare questi oggetti durante l'esplorazione.
Prima di iniziare l'attività...
Hai già pronto ciascuno di questi articoli? Il costruttore dovrebbe controllare ciascuno dei seguenti punti:
-
Tutti i motori e i sensori sono collegati alla porta corretta?
-
I cavi intelligenti sono completamente inseriti in tutti i motori e sensori?
-
Il Cervello è acceso?
-
La radio è inserita nel Robot Brain?
-
La radio è inserita nel controller?