
![]() 教师工具箱
-
本节的目的
教师工具箱
-
本节的目的
重新思考部分的目标是让学生通过基于事件的编程来使用控制器上的按钮。
本节包括:
-
基于事件的编程概述
-
示例项目下载说明 & 概述
-
混音活动:
-
活动 A:抓取物体并将其放回指定位置!
-
活动 B:堆叠物体!
-
活动C:接力赛
-
-
混音问题
![]() 教师提示
教师提示
-
控制器可以在课前与机器人大脑配对以节省时间。 决定您是否要完成此步骤,或者您是否希望学生这样做。 按照此处的步骤 进行操作。 如果您希望学生将控制器与大脑配对,您可以打印这篇文章供学生使用。
-
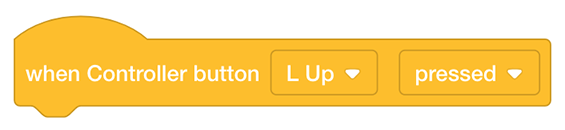
基于事件的编程使 Clawbot 能够触发事件或对触发器做出反应。 这种类型的编程使一个块能够与其他块进行通信。
换句话说,Clawbot 对控制器操纵杆的运动做出响应。 操纵杆的移动是触发器,爪机器人会做出相应的反应。
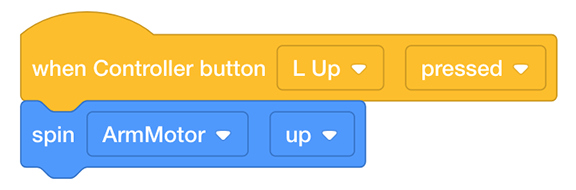
在上面的示例中,按下 L 按钮会触发 ArmMotor 向上旋转。 {When Controller button} 块将该消息传达给 [Spin] 块。 单击此处(Google / .docx / .pdf)了解有关这些块的更多信息以及它们在 Clawbot Control 示例项目中的使用方式。
![]() 教师工具箱
-
学生的重新思考角色
教师工具箱
-
学生的重新思考角色
在“重新思考”部分的开始,将学生分组并让学生选择自己的角色。 要重温促进小组的角色和技巧,请单击下面。

基于事件的编程
如果您的狗给您带来了皮带或坐在门边,那么它是在让您知道它需要出去。 在学校里,当你的老师问问题并看到你举手时,她知道你相信你知道答案并且愿意回答这个问题。 这些行为也称为“触发因素”。
你的狗知道,给你带上皮带或坐在门边会触发你知道它需要出去。 所以,当你看到他带着皮带坐在门口时,你就会对扳机做出反应,把他带出去。 举手是让老师知道你想回答她的问题的触发器。 然后老师对触发做出反应,召唤你。
机器人技术中基于事件的编程是指某些机器人行为触发机器人做某些事情或对某些触发器做出反应。
要了解有关基于事件的编程的更多信息,请通过单击工具栏中的教程并选择事件教程来观看我们的事件教程。

![]() 教师工具箱
-
复习积木
教师工具箱
-
复习积木
-
作为整个课堂活动,与学生一起复习编程模块。 告诉学生,Clawbot Control 项目中的多个事件可以同时触发,使他们能够控制 Clawbot 的驾驶运动以及 Clawbot 的手臂和爪子的运动。
-
如果学生需要快速回顾 VEXcode IQ,他们可以在调查期间随时参考教程。 教程位于工具栏中。 学生可以通过教程查看保存、下载和运行项目以及其他项目。

控制器:爪机器人控制
现在,您可以下载示例项目并使用控制器同时操作 Clawbot、其手臂和爪子!
每个组中的建造者应该获得所需的硬件。 记录员应该拿到小组的工程笔记本。 程序员应打开 VEXcode IQ。
| 数量 | 所需材料 |
|---|---|
| 1 |
爪机器人 |
| 1 |
充满电的机器人电池 |
| 1 |
VEX IQ 收音机 |
| 1 |
控制器 |
| 1 |
系绳电缆 |
| 1 |
VEXcode IQ |
| 1 |
USB 电缆(如果使用计算机) |
| 1 |
工程笔记本 |
![]() 教师提示
教师提示
-
确保每个学生小组都有所有必要的材料。
-
为学生模拟每个故障排除步骤。 提醒学生每个小组都有一个人扮演建造者的角色。 该人应该在整个探索过程中检查这些项目。