
![]() Opettajan työkalupakki
-
Tämän osan tarkoitus
Opettajan työkalupakki
-
Tämän osan tarkoitus
Rethink-osion tavoitteena on, että opiskelijat voivat käyttää ohjaimen painikkeita tapahtumapohjaisen ohjelmoinnin avulla.
Tämä osio sisältää:
-
Tapahtumapohjaisen ohjelmoinnin yleiskatsaus
-
Esimerkkiprojektin latausohjeet & Yleiskatsaus
-
Remix-toiminnot:
-
Tehtävä A: Tartu esineisiin ja palauta ne paikkaan!
-
Tehtävä B: Pinoa esineitä!
-
Tehtävä C: Viestikilpailu
-
-
Remix-kysymykset
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Ohjain voidaan yhdistää Robot Brainin kanssa ennen oppituntia ajan säästämiseksi. Päätä, haluatko suorittaa tämän vaiheen vai haluatko oppilaiden tekevän niin. Noudata ohjeita tässä. Voit tulostaa tämän artikkelin opiskelijoiden käyttöön, jos haluat heidän yhdistävän ohjaimen aivoihin.
-
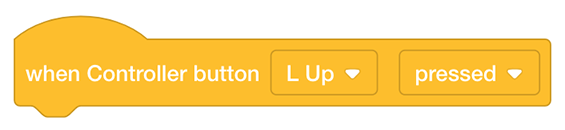
Tapahtumapohjainen ohjelmointi antaa Clawbotille mahdollisuuden laukaista tapahtumia tai reagoida niihin. Tämän tyyppinen ohjelmointi mahdollistaa yhden lohkon kommunikoinnin muiden lohkojen kanssa.
Toisin sanoen Clawbot reagoi ohjaimen ohjainsauvojen liikkeisiin. Joystickin liike on laukaisin, ja Clawbot reagoi vastaavasti.
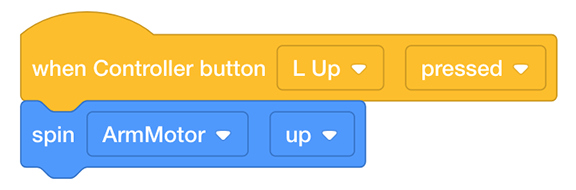
Yllä olevassa esimerkissä L-painikkeen painaminen on liipaisin, joka pyörittää ArmMotorin ylös. {When Controller button} lohko välittää tämän viestin [Spin]-lohkoon. Napsauta tätä (Google / .docx / .pdf) saadaksesi lisätietoja näistä lohkoista ja kuinka niitä käytetään Clawbot Control -esimerkkiprojektissa.
![]() Opettajan työkalupakki
-
Oppilaiden roolit uudelleen
Opettajan työkalupakki
-
Oppilaiden roolit uudelleen
Rethink-osion alussa laita opiskelijat ryhmiinsä ja pyydä opiskelijoita valitsemaan roolinsa. Jos haluat päivitystä rooleista ja vinkkejä ryhmien ohjaamiseen, napsauta alta.

Tapahtumapohjainen ohjelmointi
Jos koirasi tuo sinulle talutushihnansa tai istuu oven vieressä, hän ilmoittaa sinulle, että hänen täytyy mennä ulos. Kun koulussa opettajasi kysyy kysymyksen ja näkee sinun nostavan kätesi, hän tietää, että uskot tietäväsi vastauksen ja haluaisit vastata kysymykseen. Näitä käyttäytymismalleja kutsutaan myös "laukaiseiksi".
Koirasi tietää, että hihnan tuominen sinulle tai oven vieressä istuminen on laukaisin, joka kertoo, että hänen täytyy mennä ulos. Joten kun näet hänen istuvan oven vieressä hihnallaan, reagoit liipaisuun ottamalla hänet ulos. Käden nostaminen on laukaisin, jonka avulla opettaja tietää, että haluat vastata hänen kysymykseensä. Sitten opettaja reagoi liipaisuun kutsumalla sinua.
Tapahtumapohjainen ohjelmointi robotiikassa on sitä, kun tietyt robotin käyttäytymiset laukaisevat robotin tekemään tiettyjä asioita tai reagoimaan tiettyihin laukaisimiin.
Saat lisätietoja tapahtumapohjaisesta ohjelmoinnista katsomalla tapahtumien opetusohjelmamme napsauttamalla työkalupalkissa Opetusohjelmat ja valitsemalla Tapahtumat-opetusohjelman.

![]() Opettajan työkalupakki
-
Lohkojen tarkistaminen
Opettajan työkalupakki
-
Lohkojen tarkistaminen
-
Käy koko luokan aikana ohjelmointilohkot läpi oppilaiden kanssa. Kerro oppilaille, että Clawbot Control -projektissa voidaan käynnistää useita tapahtumia samanaikaisesti, jolloin he voivat hallita Clawbotin ajoliikettä sekä Clawbotin käsivarren ja kynnen liikettä.
-
Jos opiskelijat tarvitsevat nopean arvion VEXcode IQ:sta, he voivat viitata opetusohjelmiin milloin tahansa tämän tutkimuksen aikana. Opetusohjelmat sijaitsevat työkalupalkissa. Opiskelijat voivat tarkastella projektin tallentamista, lataamista ja suorittamista sekä muita kohteita opetusohjelmien avulla.

Ohjain: Clawbot Control
Nyt olet valmis lataamaan esimerkkiprojektin ja käyttämään Ohjainta ohjaamaan Clawbotia, sen käsivartta ja kynsiä, kaikki samaan aikaan!
Jokaisen ryhmän rakentajan tulee hankkia tarvittava laitteisto. Tallentimen tulee hankkia ryhmän suunnittelumuistikirja. Ohjelmoijan tulee avata VEXcode IQ.
| Määrä | Tarvittavat materiaalit |
|---|---|
| 1 |
Clawbot |
| 1 |
Ladattu robotin akku |
| 1 |
VEX IQ Radio |
| 1 |
Ohjain |
| 1 |
Kiinnityskaapeli |
| 1 |
VEXcode IQ |
| 1 |
USB-kaapeli (jos käytät tietokonetta) |
| 1 |
Tekninen muistikirja |
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Varmista, että jokaisella opiskelijaryhmällä on kaikki tarvittavat materiaalit.
-
Mallina jokainen vianetsintävaihe opiskelijoille. Muistuta oppilaita, että jokaisessa ryhmässä on joku rakentajan roolissa. Kyseisen henkilön tulisi tarkistaa nämä kohteet koko tutkimuksen ajan.
Ennen kuin aloitat toiminnan...
Onko sinulla kaikki nämä tuotteet valmiina? Rakentajan tulee tarkistaa jokainen seuraavista:
-
Onko kaikki moottorit ja anturit kytketty oikeaan porttiin?
-
Ovatko älykaapelit täysin kytketty kaikkiin moottoreihin ja antureihin?
-
Onko Brain päällä?
-
Onko akku ladattu?
-
Onko Controller paritettu Robot Brainin kanssa?
-
Onko -radio asetettu Robot Brain:een?