
Lập trình dựa trên sự kiện: Giao tiếp giữa các khối
![]() Hộp công cụ dành cho giáo viên
-
Mục đích của phần này
Hộp công cụ dành cho giáo viên
-
Mục đích của phần này
Mục tiêu của phần Suy nghĩ lại là để học sinh sử dụng các nút trên Bộ điều khiển bằng cách sử dụng lập trình dựa trên sự kiện.
Phần này bao gồm:
- Tổng quan về lập trình dựa trên sự kiện
- & Tổng quan về Hướng dẫn tải xuống dự án ví dụ
- Hoạt động phối lại:
- Hoạt động A: Lấy đồ vật và trả lại vị trí!
- Hoạt động B: Xếp chồng các đồ vật!
- Hoạt động C: Đua rơ le
- Câu hỏi phối lại
![]() Lời khuyên của giáo viên
Lời khuyên của giáo viên
- Bộ điều khiển có thể được ghép nối với Bộ não Robot trước giờ học để tiết kiệm thời gian. Quyết định xem anh chị em muốn hoàn thành bước này hay muốn học viên làm như vậy. Thực hiện theo các bước sau đây. Bạn có thể in bài viết này để sinh viên sử dụng, nếu bạn muốn họ ghép nối Bộ điều khiển với Bộ não.
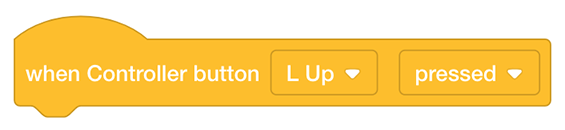
- Lập trình dựa trên sự kiện cung cấp cho Clawbot khả năng kích hoạt các sự kiện hoặc phản ứng với các yếu tố kích hoạt. Kiểu lập trình này cho phép một khối giao tiếp với các khối khác.
Nói cách khác, Clawbot phản ứng với các chuyển động của cần điều khiển. Chuyển động của Cần điều khiển là yếu tố kích hoạt và Clawbot phản ứng tương ứng.
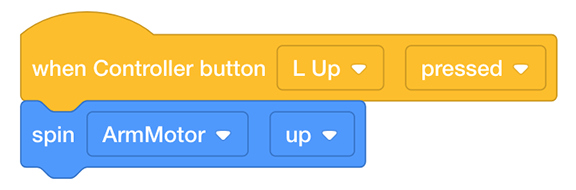
Trong ví dụ trên, nhấn nút L là kích hoạt quay ArmMotor lên. {When Controller button} Khối truyền thông điệp đó đến khối [Quay]. Nhấp vào đây (Google / .docx / .pdf) để tìm hiểu thêm về các khối này và cách chúng được sử dụng trong dự án ví dụ về Clawbot Control.
![]() Hộp công cụ dành cho giáo
viên
- Vai trò suy nghĩ lại của học sinh
Hộp công cụ dành cho giáo
viên
- Vai trò suy nghĩ lại của học sinh
Ở đầu phần Suy Nghĩ Lại, hãy đưa học viên vào nhóm của các em và yêu cầu học viên chọn vai trò của các em. Để biết thêm thông tin về các vai trò và mẹo hỗ trợ nhóm, hãy nhấp vào bên dưới.
Google Doc / .docx / .pdf

Lập trình dựa trên sự kiện
Nếu con chó của bạn mang cho bạn dây xích hoặc ngồi cạnh cửa, nó sẽ cho bạn biết rằng nó cần phải ra ngoài. Ở trường, khi giáo viên đặt câu hỏi và thấy bạn giơ tay, cô ấy biết rằng bạn tin rằng bạn biết câu trả lời và muốn trả lời câu hỏi. Những hành vi này còn được gọi là “yếu tố kích hoạt”. "
Con chó của bạn biết rằng việc mang dây xích hoặc ngồi cạnh cửa cho bạn biết rằng nó cần phải ra ngoài. Vì vậy, khi bạn nhìn thấy anh ta ngồi bên cửa với dây xích, bạn phản ứng với cò súng bằng cách đưa anh ta ra ngoài. Giơ tay lên là yếu tố kích hoạt cho giáo viên biết bạn muốn trả lời câu hỏi của cô ấy. Sau đó, giáo viên phản ứng với cò súng bằng cách gọi bạn. Lập trình
dựa trên sự kiện trong robot là khi một số hành vi robot nhất định kích hoạt robot thực hiện một số việc nhất định hoặc phản ứng với một số kích hoạt nhất định.
Để tìm hiểu thêm về lập trình dựa trên sự kiện, hãy xem hướng dẫn của chúng tôi về các sự kiện bằng cách nhấp vào Hướng dẫn trên thanh công cụ và chọn hướng dẫn Sự kiện.

![]() Hộp công cụ dành cho giáo viên
-
Xem lại các khối
Hộp công cụ dành cho giáo viên
-
Xem lại các khối
- Trong toàn bộ hoạt động của lớp, hãy ôn lại các khối lập trình với học viên. Nói với các sinh viên rằng nhiều sự kiện trong dự án Clawbot Control có thể được kích hoạt cùng một lúc, cho phép họ kiểm soát chuyển động lái xe của Clawbot cũng như chuyển động của Cánh tay và Móng vuốt của Clawbot.
- Nếu sinh viên cần xem lại nhanh VEXcode IQ, họ có thể tham khảo Hướng dẫn bất cứ lúc nào trong quá trình điều tra này. Các Hướng dẫn được đặt trên thanh công cụ. Sinh viên có thể xem lại việc lưu, tải xuống và chạy một dự án, cùng với các mục khác, với các hướng dẫn.

Bộ điều khiển: Clawbot Control
Bây giờ, bạn đã sẵn sàng tải xuống dự án mẫu và sử dụng Bộ điều khiển để vận hành Clawbot, Cánh tay và Móng vuốt của nó, tất cả cùng một lúc!
Builder trong mỗi nhóm sẽ nhận được phần cứng cần thiết. Người ghi chép nên lấy sổ ghi chép kỹ thuật của nhóm. Lập trình viên nên mở VEXcode IQ.
| Số lượng | Vật liệu cần thiết |
|---|---|
| 1 |
Clawbot |
| 1 |
Pin Robot đã sạc |
| 1 |
VEX IQ Radio |
| 1 |
Kiểm soát viên |
| 1 |
Cáp Tether |
| 1 |
VEXcode IQ |
| 1 |
Cáp USB (nếu sử dụng máy tính) |
| 1 |
Sổ tay kỹ thuật |
![]() Lời khuyên của giáo viên
Lời khuyên của giáo viên
-
Đảm bảo mỗi nhóm học viên có tất cả các tài liệu cần thiết.
-
Mô hình hóa từng bước khắc phục sự cố cho học viên. Nhắc học viên rằng mỗi nhóm có một người đóng vai trò là người xây dựng. Người đó nên kiểm tra các mục này trong suốt quá trình khám phá.
Trước khi bạn bắt đầu hoạt động...
Bạn đã chuẩn bị sẵn từng vật dụng này chưa? Nhà xây dựng nên kiểm tra từng điều sau đây:
-
Tất cả các động cơ và cảm biến có được cắm vào đúng cổng không?
-
Cáp thông minh có được lắp đầy đủ vào tất cả các động cơ và cảm biến không?
-
Não có hoạt độngkhông?
-
Pin đã được sạcchưa?
-
Bộ điều khiển có được ghép nối với Bộ não Robot không?