
การเขียนโปรแกรมตามเหตุการณ์: การสื่อสารระหว่างบล็อก
![]() กล่องเครื่องมือสำหรับครู
-
วัตถุประสงค์ของส่วนนี้
กล่องเครื่องมือสำหรับครู
-
วัตถุประสงค์ของส่วนนี้
เป้าหมายของส่วน Rethink คือเพื่อให้ผู้เรียนสามารถใช้ปุ่มบนตัวควบคุมโดยใช้การเขียนโปรแกรมตามเหตุการณ์
ส่วนนี้ประกอบด้วย:
- ภาพรวมการเขียนโปรแกรมตามเหตุการณ์
- ตัวอย่างโครงการ คำแนะนำการดาวน์โหลด & ภาพรวม
- กิจกรรมรีมิกซ์:
- กิจกรรม A: หยิบวัตถุและส่งคืนไปยังตำแหน่งที่ต้องการ!
- กิจกรรม B: วางวัตถุซ้อนกัน!
- กิจกรรม C: การแข่งขันวิ่งผลัด
- คำถามรีมิกซ์
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
- สามารถจับคู่คอนโทรลเลอร์กับ Robot Brain ก่อนเข้าเรียนเพื่อประหยัดเวลา ตัดสินใจว่าคุณต้องการดำเนินการขั้นตอนนี้ให้เสร็จสิ้นหรือไม่ หรือคุณต้องการให้นักเรียนดำเนินการดังกล่าว ทำตามขั้นตอน ที่นี่. คุณสามารถพิมพ์บทความนี้ออกมาเพื่อให้เหล่านักเรียนใช้ หากคุณต้องการให้พวกเขาจับคู่คอนโทรลเลอร์กับสมอง
- การเขียนโปรแกรมตามเหตุการณ์ช่วยให้ Clawbot สามารถทริกเกอร์เหตุการณ์หรือตอบสนองต่อทริกเกอร์ได้ การเขียนโปรแกรมประเภทนี้จะทำให้บล็อกหนึ่งสามารถสื่อสารกับบล็อกอื่นได้
กล่าวอีกนัยหนึ่ง Clawbot ตอบสนองต่อการเคลื่อนไหวของจอยสติ๊กของตัวควบคุม การเคลื่อนไหวของจอยสติ๊กเป็นตัวกระตุ้น และ Clawbot จะตอบสนองตามนั้น
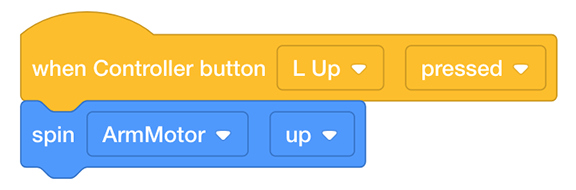
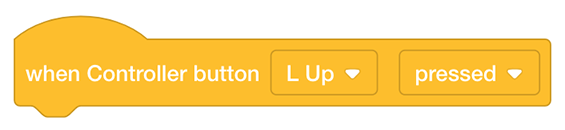
ในตัวอย่างข้างต้น การกดปุ่ม L จะเป็นการทริกเกอร์ที่จะหมุน ArmMotor ขึ้น บล็อก {When Controller button} จะส่งข้อความดังกล่าวไปยังบล็อก [Spin] คลิกที่นี่ (Google / .docx / .pdf) เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับบล็อคเหล่านี้และวิธีการใช้ในโครงการตัวอย่างการควบคุม Clawbot
![]() กล่องเครื่องมือสำหรับครู
-
การทบทวนบทบาทของนักเรียน
กล่องเครื่องมือสำหรับครู
-
การทบทวนบทบาทของนักเรียน
ในตอนต้นของส่วนการคิดใหม่ ให้แบ่งนักเรียนออกเป็นกลุ่มและให้นักเรียนเลือกบทบาทของตนเอง หากต้องการทบทวนบทบาทและเคล็ดลับในการอำนวยความสะดวกกลุ่ม โปรดคลิกด้านล่าง
Google Doc / .docx / .pdf

การเขียนโปรแกรมตามเหตุการณ์
หากสุนัขของคุณนำสายจูงมาให้คุณหรือมานั่งที่ประตู แสดงว่ามันกำลังบอกคุณว่ามันต้องการออกไปข้างนอก ที่โรงเรียน เมื่อคุณครูถามคำถามและเห็นคุณยกมือขึ้น เธอก็รู้ว่าคุณคิดว่าคุณรู้คำตอบและอยากตอบคำถามนั้น พฤติกรรมเหล่านี้เรียกอีกอย่างว่า “ตัวกระตุ้น”
สุนัขของคุณรู้ว่าการจูงสายจูงมาให้คุณหรือการนั่งที่ประตูเป็นตัวกระตุ้นที่ทำให้คุณรู้ว่าเขาต้องการออกไปข้างนอก ดังนั้นเมื่อคุณเห็นเขานั่งอยู่ที่ประตูพร้อมสายจูง คุณก็ตอบสนองต่อการกระตุ้นโดยพาเขาออกไปข้างนอก การยกมือขึ้นเป็นการกระตุ้นที่ทำให้ครูรู้ว่าคุณต้องการตอบคำถามของเธอ จากนั้นครูจะตอบสนองต่อทริกเกอร์โดยเรียกคุณ
การเขียนโปรแกรมตามเหตุการณ์ในหุ่นยนต์คือเมื่อพฤติกรรมบางอย่างของหุ่นยนต์กระตุ้นให้หุ่นยนต์ทำสิ่งต่างๆ หรือตอบสนองต่อทริกเกอร์บางอย่าง
หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับการเขียนโปรแกรมตามเหตุการณ์ โปรดดูบทช่วยสอนเกี่ยวกับเหตุการณ์ของเราโดยคลิกที่บทช่วยสอนในแถบเครื่องมือและเลือกบทช่วยสอนเหตุการณ์

![]() กล่องเครื่องมือสำหรับครู
-
การตรวจสอบบล็อค
กล่องเครื่องมือสำหรับครู
-
การตรวจสอบบล็อค
- ในการทำกิจกรรมของชั้นเรียนโดยรวม ให้ทบทวนบล็อกการเขียนโปรแกรมกับนักเรียน แจ้งนักเรียนว่าสามารถทริกเกอร์เหตุการณ์ต่างๆ ได้หลายเหตุการณ์ภายในโครงการควบคุม Clawbot พร้อมๆ กันได้ ซึ่งจะทำให้พวกเขาสามารถควบคุมการเคลื่อนไหวในการขับเคลื่อนของ Clawbot ได้ รวมถึงการเคลื่อนไหวของแขนและกรงเล็บของ Clawbot ได้
- ถ้าหากนักเรียนต้องการทบทวน VEXcode IQ อย่างรวดเร็ว พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสอบสวนนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ นักเรียนสามารถตรวจสอบการบันทึก การดาวน์โหลด และการรันโครงการ พร้อมกับรายการอื่นๆ ได้ในแบบฝึกสอน

ตัวควบคุม: ตัวควบคุม Clawbot
ตอนนี้ คุณพร้อมที่จะดาวน์โหลดโครงการตัวอย่างแล้ว และใช้คอนโทรลเลอร์เพื่อควบคุม Clawbot, Arm และ Claw ในเวลาเดียวกัน!
ผู้สร้างในแต่ละกลุ่มควรได้รับฮาร์ดแวร์ที่จำเป็น ผู้บันทึกควรได้รับสมุดบันทึกวิศวกรรมของกลุ่ม โปรแกรมเมอร์ควรเปิด VEXcode IQ
| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
กรงเล็บหุ่นยนต์ |
| 1 |
แบตเตอรี่หุ่นยนต์ชาร์จแล้ว |
| 1 |
วิทยุ VEX IQ |
| 1 |
ผู้ควบคุม |
| 1 |
สายเทเธอร์ |
| 1 |
วีเอ็กซ์โค้ด ไอคิว |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรม |
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ตรวจสอบให้แน่ใจว่ากลุ่มนักเรียนแต่ละกลุ่มมีวัสดุที่จำเป็นทั้งหมด
-
จำลองขั้นตอนการแก้ไขปัญหาแต่ละขั้นตอนให้กับนักเรียน เตือนนักเรียนว่าแต่ละกลุ่มมีคนทำหน้าที่เป็นคนก่อสร้าง บุคคลนั้นควรตรวจสอบรายการเหล่านี้ตลอดการสำรวจ
ก่อนเริ่มดำเนินกิจกรรม...
คุณมีแต่ละรายการเหล่านี้พร้อมแล้วหรือยัง? ผู้สร้างควรตรวจสอบแต่ละสิ่งต่อไปนี้:
-
มอเตอร์และเซ็นเซอร์ทั้งหมดเสียบเข้ากับพอร์ตที่ถูกต้องหรือไม่
-
สายอัจฉริยะ เสียบ เข้าไปในมอเตอร์และเซ็นเซอร์ทั้งหมดจนสุดแล้วหรือยัง?
-
สมอง เปิดไหม?
-
แบตเตอรี่ ชาร์จไหม?
-
ตัวควบคุม จับคู่ กับสมองหุ่นยนต์หรือไม่?
-
วิทยุ ถูกแทรกเข้าไปใน Robot Brainหรือไม่?
-
ได้เสียบวิทยุ เข้ากับตัวควบคุมหรือไม่?