
Ereignisbasierte Programmierung: Kommunikation zwischen Blöcken
![]() Lehrer-Toolbox
-
Der Zweck dieses Abschnitts
Lehrer-Toolbox
-
Der Zweck dieses Abschnitts
Das Ziel des Abschnitts "Umdenken" besteht darin, dass die Schüler Schaltflächen auf dem Controller mithilfe ereignisbasierter Programmierung verwenden.
Dieser Abschnitt enthält:
- Übersicht über die ereignisbasierte Programmierung
- Beispiel Projekt Download Anleitung & Übersicht
- Remix-Aktivitäten:
- Aktivität A: Schnappen Sie sich Objekte und bringen Sie sie an einen Ort zurück!
- Aktivität B: Objekte stapeln!
- Aktivität C: Staffellauf
- Remix-Fragen
![]() Lehrertipps
Lehrertipps
- Der Controller kann vor dem Unterricht mit dem Robotergehirn gekoppelt werden, um Zeit zu sparen. Entscheide, ob du diesen Schritt abschließen möchtest oder ob du möchtest, dass die Schüler dies tun. Folgen Sie den Schritten hier. Sie können diesen Artikel ausdrucken lassen, damit die Schüler ihn verwenden können, wenn Sie möchten, dass sie den Controller mit dem Gehirn koppeln.
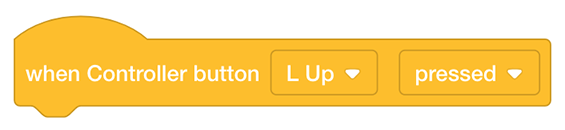
- Die ereignisbasierte Programmierung gibt dem Clawbot die Möglichkeit, Ereignisse auszulösen oder auf Auslöser zu reagieren. Diese Art der Programmierung ermöglicht es einem Block, mit anderen Blöcken zu kommunizieren.
Mit anderen Worten, der Clawbot reagiert auf die Bewegungen der Joysticks des Controllers. Die Bewegung des Joysticks ist der Auslöser und der Clawbot reagiert entsprechend.
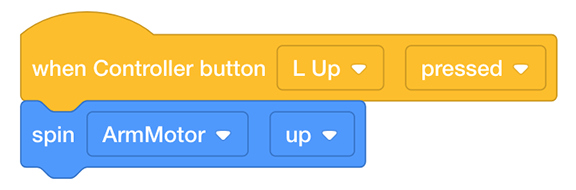
Im obigen Beispiel ist das Drücken der L-Taste der Auslöser, der den ArmMotor nach oben dreht. Der {When Controller button} Block übermittelt diese Nachricht an den [Spin] -Block. Klicken Sie hier (Google / .docx / .pdf), um mehr über diese Blöcke und ihre Verwendung im Beispielprojekt Clawbot Control zu erfahren.
![]() Lehrer-Toolbox
-
Schüler überdenken Rollen
Lehrer-Toolbox
-
Schüler überdenken Rollen
Setzen Sie zu Beginn des Abschnitts Umdenken die Schüler in ihre Gruppen ein und lassen Sie die Schüler ihre Rollen auswählen. Klicken Sie unten, um eine Auffrischung der Rollen und Tipps für die Moderation von Gruppen zu erhalten.
Google Doc / .docx / .pdf

Eventbasierte Programmierung
Wenn Ihr Hund Ihnen seine Leine bringt oder an der Tür sitzt, teilt er Ihnen mit, dass er nach draußen gehen muss. Wenn Ihre Lehrerin in der Schule eine Frage stellt und Sie Ihre Hand heben sieht, weiß sie, dass Sie glauben, die Antwort zu kennen, und möchte die Frage beantworten. Diese Verhaltensweisen werden auch als „Auslöser“ bezeichnet. "
Ihr Hund weiß, dass das Mitbringen seiner Leine oder das Sitzen an der Tür der Auslöser ist, der Sie wissen lässt, dass er nach draußen gehen muss. Wenn du ihn also mit seiner Leine an der Tür sitzen siehst, reagierst du auf den Auslöser, indem du ihn nach draußen bringst. Das Heben der Hand ist der Auslöser, der die Lehrerin wissen lässt, dass Sie ihre Frage beantworten möchten. Der Lehrer reagiert dann auf den Auslöser, indem er Sie anruft.
Ereignisbasierte Programmierung in der Robotik ist, wenn bestimmte Roboterverhalten den Roboter dazu veranlassen, bestimmte Dinge zu tun oder auf bestimmte Auslöser zu reagieren.
Um mehr über ereignisbasierte Programmierung zu erfahren, sehen Sie sich unser Tutorial zu Ereignissen an, indem Sie in der Symbolleiste auf Tutorials klicken und das Tutorial Ereignisse auswählen.

![]() Lehrer-Toolbox
-
Überprüfung der Blöcke
Lehrer-Toolbox
-
Überprüfung der Blöcke
- Besprechen Sie als Ganzes die Programmierblöcke mit den Schülern. Sagen Sie den Schülern, dass mehrere Ereignisse innerhalb des Clawbot Control-Projekts gleichzeitig ausgelöst werden können, wodurch sie die Antriebsbewegung des Clawbots sowie die Bewegung von Arm und Klaue des Clawbots steuern können.
- Wenn die Schüler eine schnelle Überprüfung des VEXcode IQ benötigen, können sie sich während dieser Untersuchung jederzeit auf die Tutorials beziehen. Die Tutorials befinden sich in der Symbolleiste. Mit den Tutorials können die Schüler das Speichern, Herunterladen und Ausführen eines Projekts zusammen mit anderen Elementen überprüfen.

Controller: Clawbot-Steuerung
Jetzt kannst du das Beispielprojekt herunterladen und den Controller verwenden, um den Clawbot, seinen Arm und seine Klaue gleichzeitig zu bedienen!
Der Builder in jeder Gruppe sollte die erforderliche Hardware erhalten. Der Recorder sollte das technische Notizbuch der Gruppe erhalten. Der Programmierer sollte VEXcode IQ öffnen.
| Menge | Benötigtes Material |
|---|---|
| 1 |
Clawbot |
| 1 |
Geladener Roboterakku |
| 1 |
VEX IQ Radio |
| 1 |
Controller |
| 1 |
Halteseil |
| 1 |
VEXcode IQ |
| 1 |
USB-Kabel (bei Verwendung eines Computers) |
| 1 |
Technisches Notizbuch |
![]() Lehrertipps
Lehrertipps
-
Stellen Sie sicher, dass jede Schülergruppe über alle notwendigen Materialien verfügt.
-
Modellieren Sie jeden der Schritte zur Fehlerbehebung für die Schüler. Erinnern Sie die Schüler daran, dass jede Gruppe jemanden in der Rolle des Erbauers hat. Diese Person sollte diese Gegenstände während der gesamten Erkundung überprüfen.
Bevor Sie mit der Aktivität beginnen...
Haben Sie jeden dieser Artikel bereit? Der Erbauer sollte jeden der folgenden Punkte überprüfen:
-
Sind alle Motoren und Sensoren an den richtigen Anschluss angeschlossen?
-
Sind die intelligenten Kabel vollständig in alle Motoren und Sensoren eingelegt?
-
Ist das Gehirn eingeschaltet?
-
Ist der Akku geladen?
-
Ist der Controller mit dem Robotergehirn gekoppelt?
-
Ist das Radio in den Controller eingesteckt?