
![]() 教師工具箱
-
本節的目的
教師工具箱
-
本節的目的
重新思考部分的目標是讓學生透過基於事件的程式來使用控制器上的按鈕。
本節包括:
-
基於事件的程式設計概述
-
範例專案下載說明 & 概述
-
混音活動:
-
活動 A:抓取物體並將其放回指定位置!
-
活動 B:堆疊物體!
-
活動C:接力賽
-
-
混音問題
![]() 老師提示
老師提示
-
控制器可以在課前與機器人大腦配對以節省時間。 決定您是否要完成此步驟,或者您是否希望學生這樣做。 請依照步驟 此處進行操作。 如果您希望學生將控制器與大腦配對,您可以列印這篇文章供學生使用。
-
基於事件的程式設計使 Clawbot 能夠觸發事件或對觸發器做出反應。 這種類型的編程使一個區塊能夠與其他區塊進行通訊。
換句話說,Clawbot 會對控制器操縱桿的動作做出反應。 操縱桿的移動是觸發器,爪機器人會做出相對應的反應。
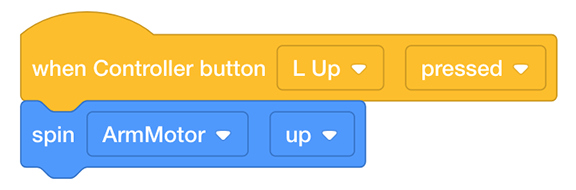
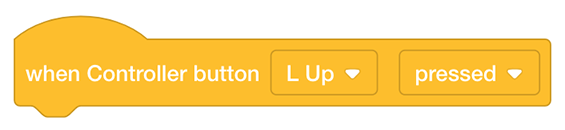
在上面的範例中,按下 L 按鈕會觸發 ArmMotor 向上旋轉。 {When Controller button} 塊將該訊息傳達給 [Spin] 塊。 按一下此處 (Google / .docx / .pdf) 以了解有關這些區塊以及它們如何在 Clawbot Control 範例專案中使用的更多資訊。

基於事件的編程
如果您的狗為您帶來了皮帶或坐在門邊,那麼它正在讓您知道它需要出去。 在學校裡,當你的老師問問題並看到你舉手時,她知道你相信你知道答案並且願意回答這個問題。 這些行為也稱為「觸發因素」。
你的狗知道,給你皮帶或坐在門邊會觸發你知道它需要出去。 所以,當你看到他帶著皮帶坐在門口時,你就會對扳機做出反應,把他帶出去。 舉手是讓老師知道你想回答她的問題的觸發器。 然後老師對觸發做出反應,召喚你。
機器人技術中基於事件的程式設計是指某些機器人行為觸發機器人做某些事情或對某些觸發器做出反應。
要了解有關基於事件的編程的更多信息,請通過單擊工具列中的教程並選擇事件教程來觀看我們的事件教程。

![]() 教師工具箱
-
複習模組
教師工具箱
-
複習模組
-
作為整個課堂活動,與學生一起複習程式設計模組。 告訴學生,Clawbot Control 專案中的多個事件可以同時觸發,使他們能夠控制 Clawbot 的駕駛動作以及 Clawbot 的手臂和爪子的運動。
-
如果學生需要快速回顧 VEXcode IQ,他們可以在調查期間隨時參考教學。 教學位於工具列中。 學生可以透過教學查看保存、下載和運行專案以及其他項目。

控制器:爪機器人控制
現在,您可以下載範例專案並使用控制器同時操作 Clawbot、其手臂和爪子!
每個組別中的建造者應該獲得所需的硬體。 記錄員應該拿到小組的工程筆記本。 程式設計師應打開 VEXcode IQ。
| 數量 | 所需材料 |
|---|---|
| 1 |
爪機器人 |
| 1 |
充滿電的機器人電池 |
| 1 |
VEX IQ 收音機 |
| 1 |
控制器 |
| 1 |
繫繩電纜 |
| 1 |
VEXcode IQ |
| 1 |
USB 連接線(如果使用電腦) |
| 1 |
工程筆記本 |
![]() 老師提示
老師提示
-
確保每個學生小組都有所有必要的材料。
-
為學生模擬每個故障排除步驟。 提醒學生每個小組都有一個人扮演建造者的角色。 該人應該在整個探索過程中檢查這些項目。