
![]() 教師用ツールボックス
-
このセクションの目的
教師用ツールボックス
-
このセクションの目的
「再考」セクションの「ギア比の計算」ページの目的は、学生がグループで作業して個々のギア比を計算し、それらを組み合わせて複合ギア比を取得できるようにすることです。 学生は複合ギア比を取得したら、その比から得られる適切な機械的利点を決定します。
学生は4人1組のグループに分かれて取り組みます。 このセクションのグループ ロールのリストについては ここ (Google Doc / .docx / .pdf) をクリックしてください。
グループで計算に取り組むように指示する前に、まず最初の例を生徒たちと一緒に説明します。 合計 3 つの計算が行われます。 最初のページ (2 つのギア比の計算) には 2 つの個別のギア比を計算する計算 1 があり、2 番目のページ (3 つのギア比の計算) には 3 つの個別のギア比を計算する計算 2 と 3 があります。
生徒たちにグループ内で作業し、必要に応じて質問するよう促します。
各計算では、次の 3 つの機械的利点のいずれかをカバーします。
-
速度の向上: 最初の数値が 2 番目の数値より小さい比率 (分子が分母より小さい)。 例は 1:15 です。
-
トルク増加: 2 番目の数値が 1 番目の数値より小さい比率 (分母が分子より小さい)。 例は 15:1 です。
-
権力の移転: 1-1 の比率(分子は分母と同じ)。 例は 1:1 です。
![]() 教師のヒント
-
語彙
教師のヒント
-
語彙
分子: 分数の上の部分。
分母: 分数の下の部分。
ギアとは何か、またそれらを使用して機械的利点を生み出す方法について説明しました。次に、さまざまなギア比を計算し、それらを組み合わせて複合ギア比を取得します。
4 人のグループに分かれてギア比を計算し、その結果得られる機械的利点を決定します。
例を見る
まず、次の例を見てください。
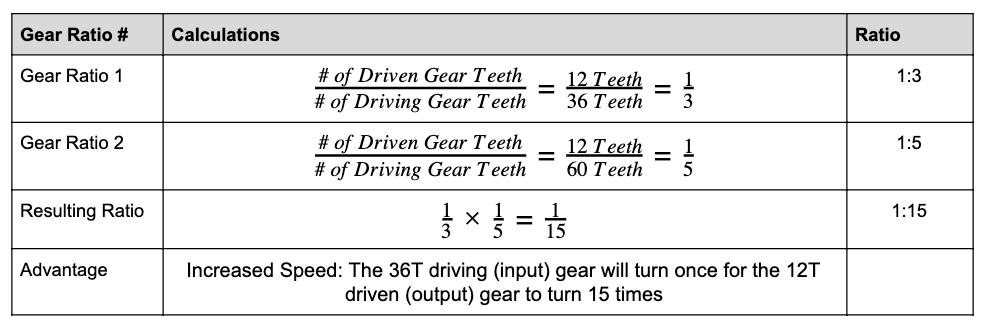
上記の例では、「結果の比率」行は、すべての個別のギア比を掛け合わせて、複合ギア比 を計算することを示しています。
ギア比 1 は 36 歯のギア (36T ギア) が 12 歯のギア (12T ギア) を駆動します。 関係を「運転」と「運転」で表示すると、結果は 12 対 36 となり、3 分の 1 に減少します。 したがって、比率は 1:3 になります。

同様に、ギア比 2 では、60T ギアが 12T ギアを駆動します。 この関係を運転対運転と見ると、60 以上が 12 となり、5 分の 1 に減ります。 したがって、比率は 1:5 になります。

これら 2 つの比率を組み合わせるために、分数乗算が導入されます。 3 分の 1 に 5 分の 1 を掛けると、15 分の 1 になります。 分数を掛け算するときは、分子と分母を直線的に掛け算することに注意してください。 したがって、複合ギア比は 1:15 になります。

複合ギア比が計算されると、機械的な利点が何であるかを判断できます。 その結果、速度が向上します。36T 駆動 (入力) ギアが 1 回回転すると、12T 駆動 (出力) ギアが 15 回回転します。

計算1
ギア比表に不足している計算を記入します。 各人が自分の役割に応じて計算する必要があることに注意してください。
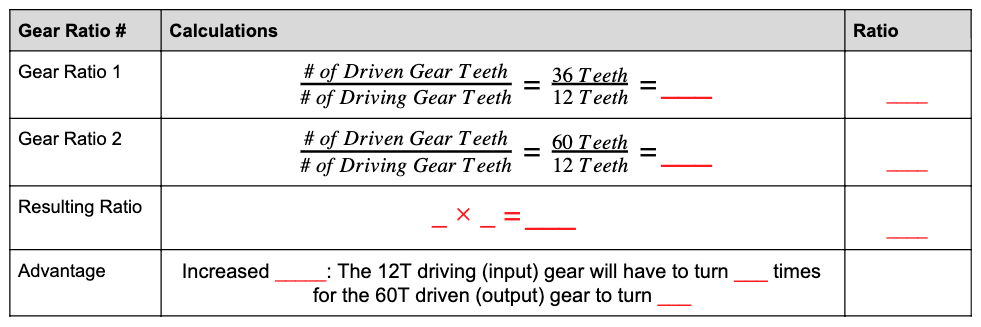
-
役割1:上記表のギア比1行を計算します。 エンジニアリング ノートブックにすべての作業を表示します。
-
役割 2: 上記の表のギア比 2 行を計算します。 エンジニアリング ノートブックにすべての作業を表示します。
-
役割 3: 上記の表の結果比率の行を計算します。 最終的な複合ギヤ比を計算する前に、ギヤ比 1 と 2 の計算を確認してください。 エンジニアリング ノートブックにすべての作業を表示します。
-
役割 4: 上記の表のアドバンテージ行を計算します。 エンジニアリング ノートブックにすべての作業を表示します。
-
すべての役割: 表が完成したら、計算が正しいことをグループメンバー全員で確認します。
![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
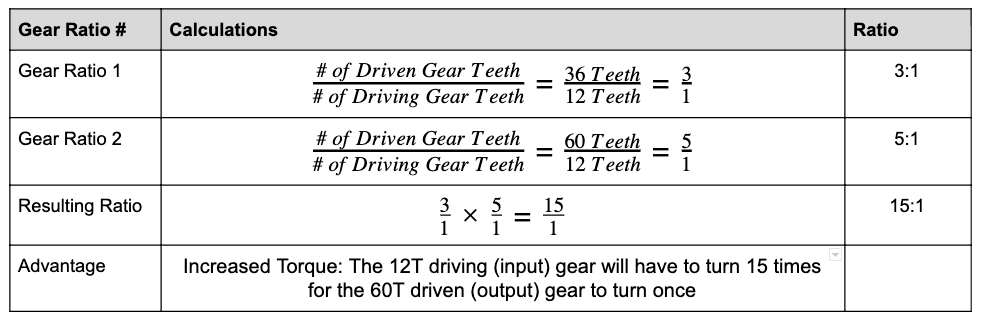
計算 1 の次の解表が提供されます。 Calculate 1 は、最初に提供された例の逆であることに注意してください。 複合ギア比は 1:15 ではなく、15:1 になります。 解決策を検討するときに、このパターンを生徒に指摘してください。
さらに、生徒が概念を確実に理解できるように、速度とトルクの違いについての数学的推論を取り上げます。これについては、次のページの機械的優位性のための教師用ツールボックスで詳しく説明します。
![]() 議論を促す
議論を促す
質問: 複合ギア比を計算するときに使用する演算は何ですか?
回答: 乗算。 分数を掛けるときは、分子と分母にまたがって掛けます。
質問: トルクの増加による機械的利点は、競技中のロボットにとって何を意味しますか?
回答: 回答はさまざまですが、例としては、ロボットが重い物を持ち上げたり運んだりすることが挙げられます。