
Упражняться
В последнем разделе вы узнали об элементах руки робота и о том, как работают механизмы руки. Теперь вы собираетесь применить полученные знания в процессе сборки, чтобы завершить практическое задание «Улучши свою руку».
В этом задании вашему роботу придется подъехать к кубу IQ, взять и поднять его на другой куб, чтобы образовать стопку. Вы будете дорабатывать конструкцию руки, чтобы улучшить способность вашего робота складывать куб. Посмотрите видео ниже, чтобы узнать, как вы можете применить полученные знания для выполнения практического упражнения «Улучши свою руку».
Теперь ваша очередь выполнить практическое задание «Улучши свою руку»!
В этой анимации контроллер используется для того, чтобы подвести робота к красному кубу, поднять его, затем поднять куб и поместить его поверх синего куба. На этой анимации показан один из возможных способов движения вашего робота для выполнения упражнения «Улучши свою руку».
Используйте этот документ в качестве справочного материала для выполнения практического задания.
Выполняя практическое задание «Улучши свою руку», запишите в своей инженерной тетради следующее:
- Опишите и проиллюстрируйте конструкцию вашего робота.
- Как ваш дизайн когтей и рук взаимодействует при выполнении задания?
- Как можно усовершенствовать эту конструкцию, чтобы улучшить производительность робота?
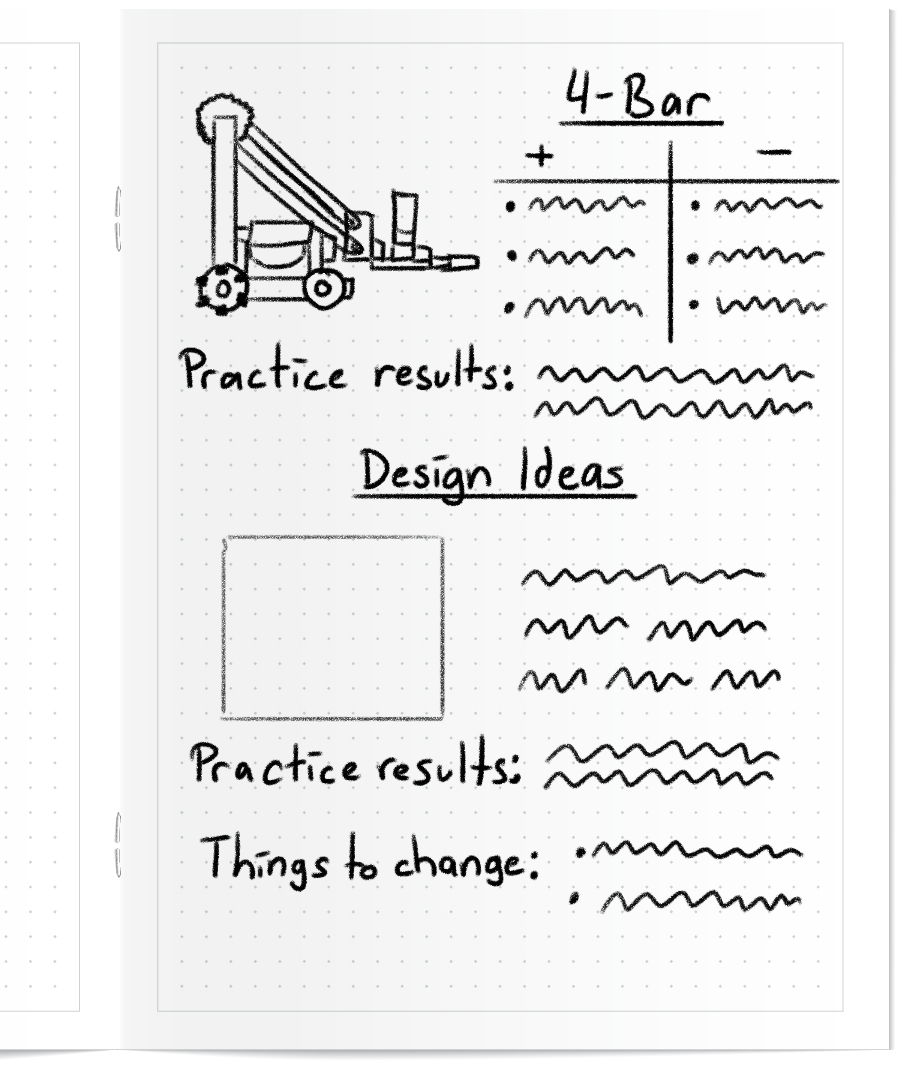
На изображении слева показан пример того, как можно записать свои дизайнерские идеи и тесты.
Дизайн Рук
В разделе «Обучение» вы узнали о различных типах конструкций рук, и во время видео вам были показаны эти . Используйте приведенную ниже анимацию рук в качестве ориентира при разработке дизайна вашей руки.
4-барный рычаг
Этот рычаг состоит из параллельных рычагов, которые позволяют поднимаемому объекту оставаться на одном уровне. Это конструкция руки, используемая в инструкциях по сборке робота Clawbot.
Поворотный рычаг
Поворотный рычаг — один из самых простых в сборке. Конец руки следует по дуге, когда шестерня вращается, и может пройти через верхнюю часть и достичь другой стороны робота, как показано на этой анимации.
Двойной реверсивный рычаг с 4 стержнями
Сборка этого рычага требует больше времени, но он полезен, когда концевой манипулятор рычага необходимо постоянно держать на одном уровне или поднимать выше. Двойной реверсивный рычаг из 4 стержней состоит из верхней и нижней 4 стержней с двумя вертикальными секциями, которые можно увидеть на этой анимации.
Подготовьтесь к вызову
В режиме «Соревнования» (на следующей странице) вы проверите конструкцию своих рук в соревновании Stacked Up Challenge. Узнайте, как участвовать в соревновании, проверьте свое понимание, а затем попрактикуйтесь в выполнении задания.
Цель этого задания — с помощью контроллера управлять своим роботом и собрать как можно больше кубиков за минуту.
Посмотрите эту анимацию, чтобы увидеть пример того, как Clawbot складывает кубики в испытании Stacked Up .
Следуйте инструкциям в этом документе, чтобы узнать больше о том, как выполнить это задание.
Проверьте свое понимание
Прежде чем приступить к выполнению задания, убедитесь, что вы понимаете правила и порядок выполнения задания, ответив на вопросы из документа ниже в своей инженерной тетради.
Проверьте свое понимание вопросов
После ответа на вопросы попробуйте попрактиковаться в выполнении задания.
Выберите Далее > , чтобы принять участие в Stacked Up Challenge.