
التدريب
في القسم الأخير، تعرفت على عناصر ذراع الروبوت وكيف تعمل آليات الذراع المختلفة. الآن، ستقوم بتطبيق ما تعلمته لتكراره على البنية لإكمال نشاط ممارسة تحسين ذراعك.
في هذا النشاط، سيتعين على الروبوت الخاص بك القيادة إلى مكعب الذكاء، والتقاط المكعب، ورفعه فوق مكعب آخر لصنع كومة. ستكرر تصميم الذراع لتحسين قدرة الروبوت على تكديس المكعب. شاهد الفيديو أدناه لمعرفة كيف يمكنك تطبيق ما تعلمته لإكمال نشاط ممارسة تحسين ذراعك.
حان دورك الآن لإكمال نشاط تدريب تحسين الذراع!
في هذه الرسوم المتحركة، يتم استخدام وحدة تحكم لقيادة الروبوت إلى المكعب الأحمر، والتقاطه، ثم رفع المكعب ووضعه فوق المكعب الأزرق. توضح هذه الرسوم المتحركة إحدى الطرق الممكنة التي يمكن أن يتحرك بها روبوتك لإكمال نشاط ممارسة تحسين ذراعك.
استخدم هذا المستند كمرجع لإكمال نشاط الممارسة.
عند إكمال نشاط ممارسة تحسين ذراعك، قم بتوثيق ما يلي في دفتر ملاحظاتك الهندسية:
- صف ووضح تصميم الروبوت الخاص بك.
- كيف يعمل تصميم المخلب والذراع معًا لإكمال النشاط ؟
- كيف يمكنك تكرار هذا التصميم لتحسين أداء الروبوت ؟
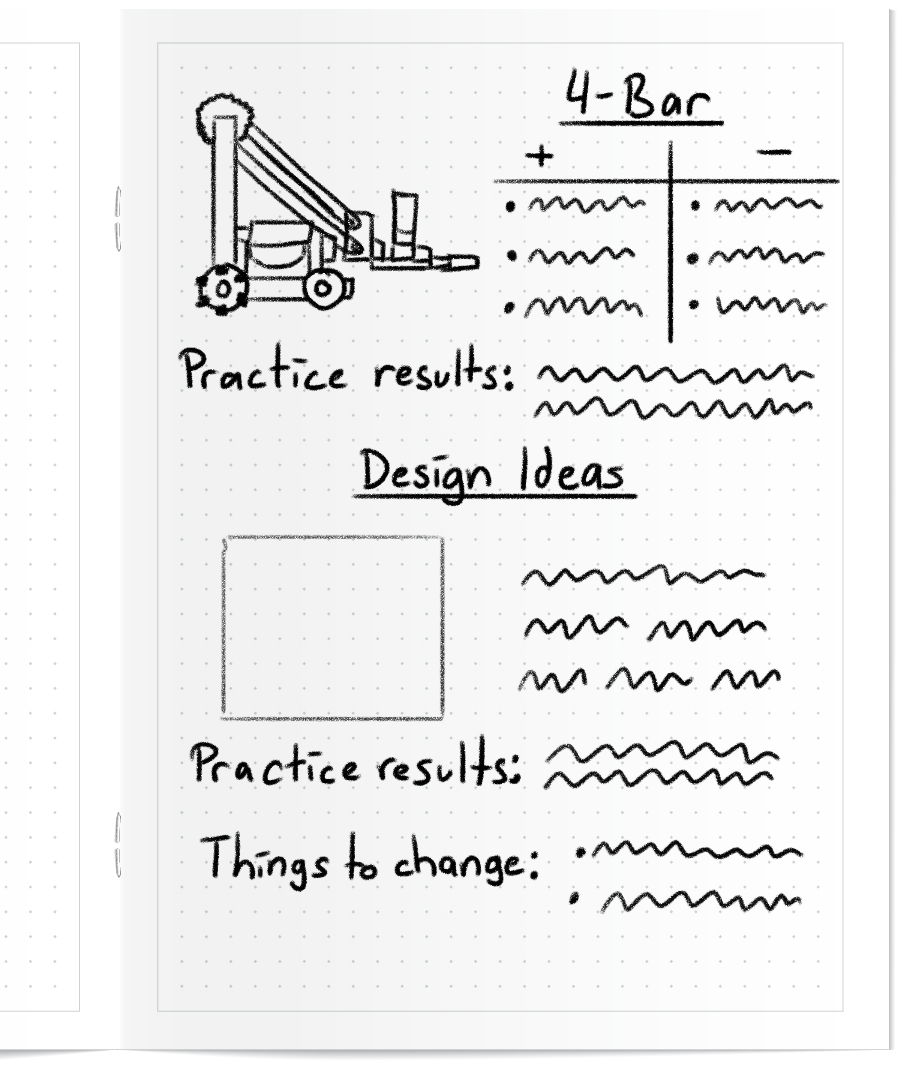
انظر الصورة على اليسار للحصول على مثال لكيفية تسجيل أفكار التصميم والاختبارات الخاصة بك.
تصاميم الذراع
في قسم تعلم، تعرفت على أنواع مختلفة من تصاميم الذراع وتم عرض هذه الرسوم المتحركة أثناء الفيديو. استخدم هذه الرسوم المتحركة للذراع أدناه للرجوع إليها أثناء التكرار على تصميم ذراعك.
ذراع رباعي القضبان
يتكون هذا الذراع من روابط متوازية تسمح للكائن الذي يتم رفعه بالبقاء مستويًا. هذا هو تصميم الذراع المستخدم في تعليمات بناء Clawbot. شاهد الرسوم المتحركة لمشاهدة حركة الذراع رباعي القضبان.
ذراع التأرجح
الذراع المتأرجحة هي واحدة من أسهل الأذرع في التجميع. يتبع طرف الذراع قوسًا أثناء دوران الترس ويمكن أن يمر فوق الجزء العلوي ويصل إلى الجانب الآخر من الروبوت كما هو موضح في هذه الرسوم المتحركة.
ذراع ذو 4 قضبان معكوسة مزدوجة
يستغرق هذا الذراع مزيدًا من الوقت للتجميع، ولكنه مفيد عندما يحتاج مناور نهاية الذراع إلى الحفاظ على مستواه في جميع الأوقات أو للوصول إلى مستوى أعلى. يتكون الذراع المزدوج العكسي المكون من 4 بار من 4 بار علوي وسفلي مع قسمين عموديين، يمكن رؤيتهما في هذه الرسوم المتحركة.
الاستعداد للتحدي
في المنافسة (في الصفحة التالية)، ستختبر تصميمات ذراعك في التحدي المكدس. تعلم كيفية التنافس في التحدي، وتحقق من فهمك، ثم تدرب على التحدي.
الهدف من هذا التحدي هو استخدام وحدة التحكم لقيادة الروبوت الخاص بك وتكديس أكبر عدد ممكن من المكعبات في غضون دقيقة واحدة.
شاهد هذه الرسوم المتحركة لمشاهدة مثال على تكديس مكعبات Clawbot في تحدي Stacked Up.
اتبع الخطوات الواردة في هذا المستند لمعرفة المزيد حول كيفية إكمال هذا التحدي.