
Практика
У минулому розділі ви дізналися про елементи руки робота та про те, як працюють різні механізми руки. Тепер ви збираєтеся застосувати те, що ви навчилися, під час збирання, щоб завершити вправу «Поліпшити свою руку».
У цій вправі ваш робот повинен під’їхати до IQ Cube, підняти куба та підняти його на інший куб, щоб скласти стопку. Ви будете повторювати конструкцію руки, щоб покращити здатність вашого робота складати куб. Перегляньте відео нижче, щоб побачити, як ви можете застосувати те, що ви навчилися, щоб виконати практичну вправу «Удосконали свою руку».
Тепер ваша черга завершити вправу «Удосконали свою руку»!
У цій анімації контролер використовується для того, щоб підвести робота до червоного куба, підняти його, а потім підняти куб і покласти його на синій куб. Ця анімація показує один із можливих способів, як ваш робот може рухатися, щоб завершити тренувальну вправу «Удосконали свою руку».
Використовуйте цей документ як довідник для виконання практичної вправи.
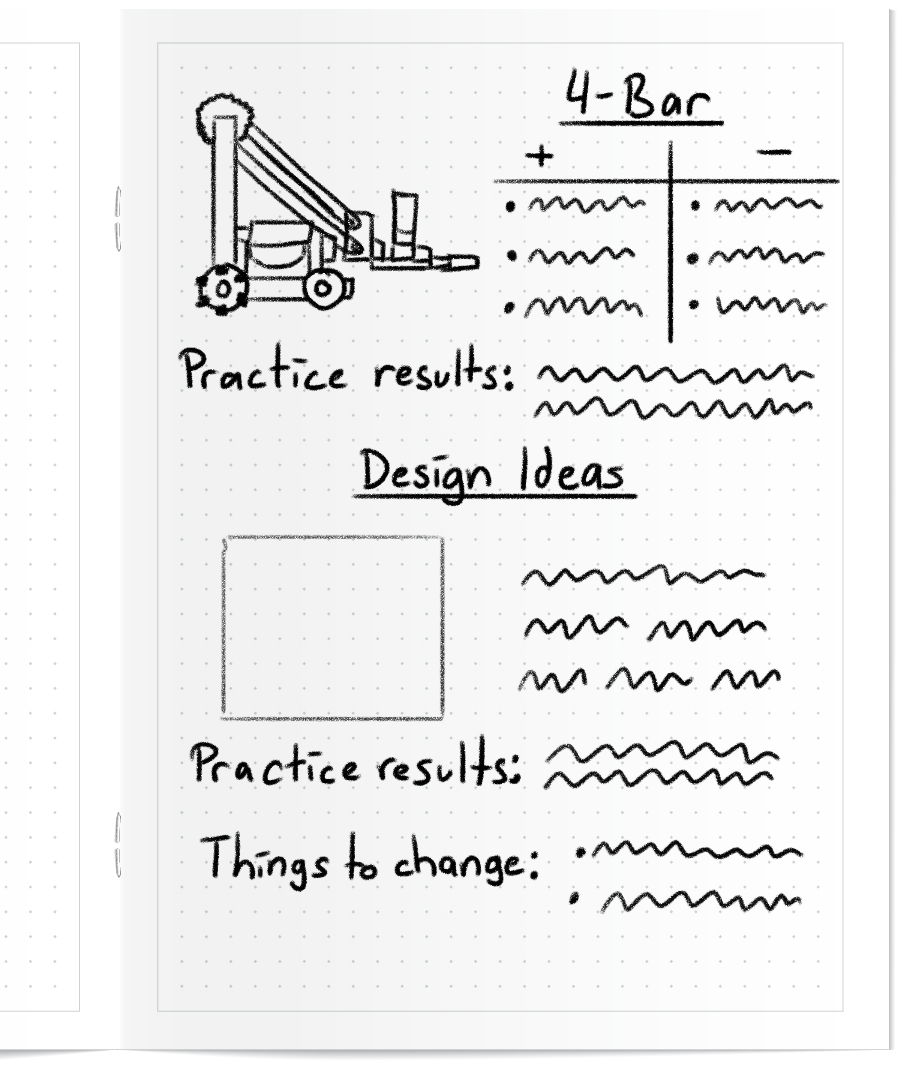
Виконуючи практичну вправу «Поліпшити свою руку», запишіть наступне у свій інженерний блокнот:
- Опишіть та проілюструйте дизайн вашого робота.
- Як ваша конструкція кігтів і рук працює разом, щоб завершити вправу?
- Як ви можете повторити цей дизайн, щоб покращити продуктивність робота?
Дивіться зображення ліворуч для прикладу того, як ви можете записувати свої дизайнерські ідеї та тести.
Дизайн рук
У розділі «Навчіться» ви дізналися про різні типи конструкцій рук і вам показали ці анімації під час відео. Використовуйте ці анімовані зображення рук нижче, щоб посилатися під час ітерації дизайну вашої руки.
4-Bar Arm
Ця рука складається з паралельних зв’язків, які дозволяють об’єкту, який піднімається, залишатися рівним. Це дизайн руки, який використовується в інструкціях зі створення Clawbot.
Поворотний важіль
Поворотний кронштейн — один із самих простих у збірці. Кінець руки повторює дугу, коли шестерня обертається, і може пройти через верх і досягти іншої сторони робота, як показано на цій анімації.
Подвійний зворотний 4-барний кронштейн
Ця рука займає більше часу, щоб зібратися, але вона корисна, коли кінцевий маніпулятор руки потрібно постійно тримати рівно або тягнутися вище. Подвійна реверсна 4-барна рука складається з верхньої та нижньої 4-х ліній з двома вертикальними секціями, які можна побачити на цій анімації.
Підготуйтеся до виклику
У Compete (на наступній сторінці) ви перевірите свої конструкції рук у Stacked Up Challenge. Дізнайтеся, як брати участь у випробуванні, перевірте своє розуміння, а потім потренуйтеся до випробування.
Мета цього завдання — за допомогою контролера керувати своїм роботом і складати якомога більше кубиків протягом хвилини.
Перегляньте цю анімацію, щоб побачити приклад Clawbot, який складає кубики в Stacked Up Challenge.
Виконайте кроки в цьому документі, щоб дізнатися більше про те, як виконати це завдання.
Перевірте ваше розуміння
Перш ніж розпочати завдання, переконайтеся, що ви розумієте правила та налаштування завдання, відповівши на запитання в документі нижче у вашому інженерному блокноті.
Перевірте своє розуміння запитань
Відповівши на запитання, спробуйте попрактикуватися в випробуванні.
Виберіть Далі > , щоб взяти участь у Stacked Up Challenge.