
Práctica
En la última sección, aprendiste sobre los elementos de un brazo robótico y cómo funcionan los diferentes mecanismos del brazo. Ahora, vas a aplicar lo que has aprendido para iterar en la compilación para completar la actividad de práctica Mejora tu brazo.
En esta actividad, tu robot tendrá que conducir a un cubo IQ, recoger el cubo y levantarlo encima de otro cubo para hacer una pila. Iterarás en el diseño del brazo para mejorar la capacidad de tu robot para apilar el cubo. Mire el video a continuación para ver cómo puede aplicar lo que ha aprendido para completar la actividad de práctica Mejore su brazo.
¡Ahora es tu turno de completar la actividad de práctica Mejora tu brazo!
En esta animación, se utiliza un controlador para conducir el robot al cubo rojo, recogerlo, luego levantar el cubo y colocarlo encima del cubo azul. Esta animación muestra una posible forma en que tu robot podría moverse para completar la actividad de práctica Mejora tu brazo.
Utilice este documento como referencia para completar la actividad de práctica.
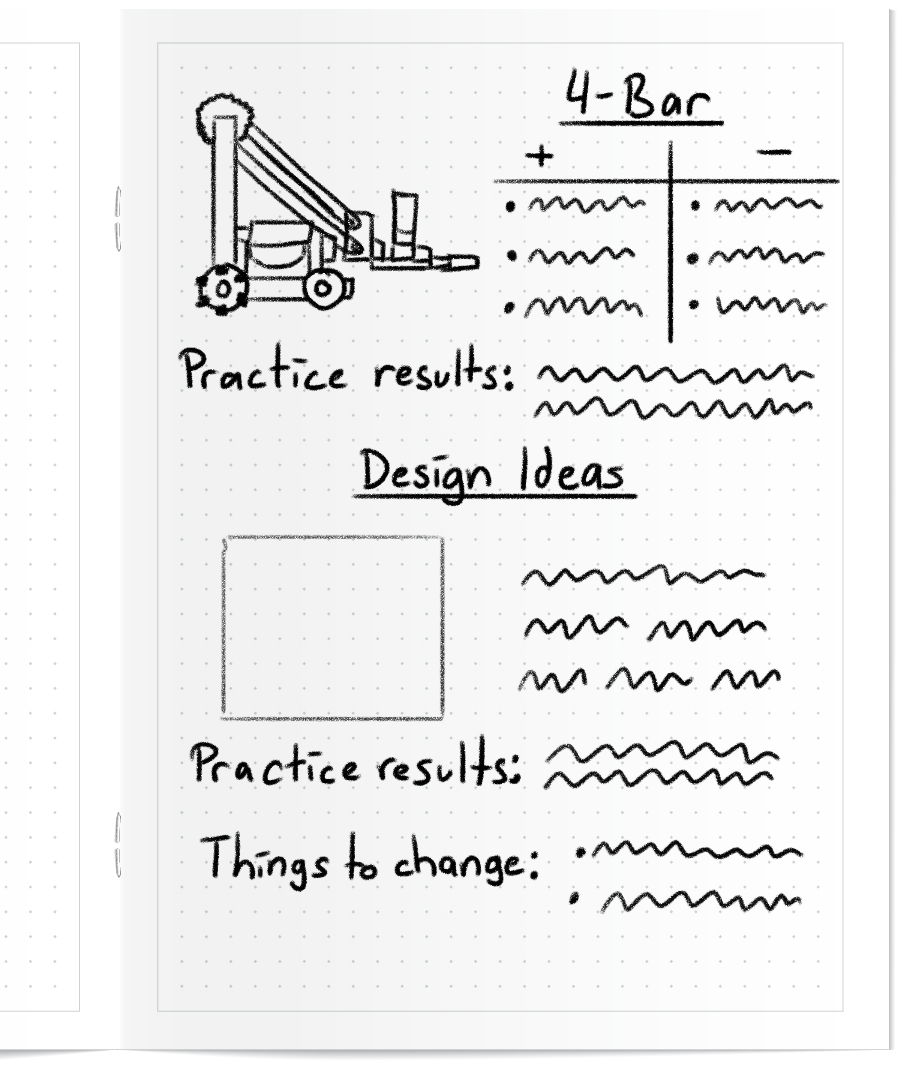
A medida que complete la actividad de práctica Mejore su brazo, documente lo siguiente en su cuaderno de ingeniería:
- Describe e ilustra el diseño de tu robot.
- ¿Cómo funciona el diseño de tu garra y brazo para completar la actividad?
- ¿Cómo puede iterar en este diseño para mejorar el rendimiento del robot?
Vea la imagen de la izquierda para ver un ejemplo de cómo puede registrar sus ideas y pruebas de diseño.
Diseños de brazos
En la sección Aprender, aprendiste sobre los diferentes tipos de diseños de brazos y se te mostraron estas animaciones durante el vídeo. Utilice estas animaciones de brazo a continuación para hacer referencia mientras itera en el diseño de su brazo.
Brazo de 4 barras
Este brazo se compone de articulaciones paralelas que permiten que el objeto que se está elevando permanezca nivelado. Este es el diseño de brazo utilizado en las instrucciones de construcción de Clawbot. Mira la animación para ver el movimiento del brazo de 4 barras.
Brazo oscilante
Un brazo oscilante es uno de los brazos más fáciles de montar. El extremo del brazo sigue un arco a medida que el engranaje gira y podría pasar por encima de la parte superior y llegar al otro lado del robot como se muestra en esta animación.
Brazo doble inverso de 4 barras
Este brazo tarda más tiempo en ensamblarse, pero es útil cuando el manipulador final del brazo debe mantenerse nivelado en todo momento o llegar más alto. El brazo doble inverso de 4 barras está formado por una barra superior e inferior de 4 barras con dos secciones verticales, que se pueden ver en esta animación.
Prepárate para el reto
En Competir (en la página siguiente), probarás los diseños de tus brazos en el Desafío apilado. Aprende a competir en el desafío, comprueba tu comprensión y luego practica para el desafío.
El objetivo de este desafío es usar el controlador para conducir tu robot y apilar tantos cubos como puedas en un minuto.
Mira esta animación para ver un ejemplo de un Clawbot apilando cubos en el Desafío Apilado.
Sigue los pasos de este documento para obtener más información sobre cómo completar este desafío.
Compruebe su comprensión
Antes de comenzar el desafío, asegúrese de comprender las reglas y la configuración del desafío respondiendo las preguntas del siguiente documento en su cuaderno de ingeniería.
Comprueba tus preguntas de comprensión
Después de completar las preguntas, intente practicar el desafío.
Selecciona Siguiente > para competir en el Desafío apilado.