
ฝึกฝน
ในหัวข้อสุดท้าย คุณจะได้เรียนรู้เกี่ยวกับส่วนประกอบของแขนหุ่นยนต์ และกลไกการทำงานของแขนแต่ละ ตอนนี้ คุณจะนำสิ่งที่คุณเรียนรู้มาประยุกต์ใช้ในรูปแบบการทำซ้ำเพื่อสร้างกิจกรรมฝึกฝนปรับปรุงแขนของคุณให้เสร็จสมบูรณ์
ในกิจกรรมนี้ หุ่นยนต์ของคุณจะต้องขับไปที่ IQ Cube หยิบ ขึ้นมาและยกไปไว้ด้านบนของลูกบาศก์อีกอันเพื่อสร้างกอง คุณจะทำซ้ำในการออกแบบแขนเพื่อปรับปรุงความสามารถของหุ่นยนต์ในการซ้อนลูกบาศก์ ชมวิดีโอด้านล่างเพื่อดูว่าคุณสามารถนำสิ่งที่คุณเรียนรู้ไปปรับใช้เพื่อทำกิจกรรมฝึกฝนปรับปรุงแขนของคุณได้อย่างไร
ตอนนี้ถึงคราวของคุณที่จะทำกิจกรรมฝึกฝนปรับปรุงแขนของคุณแล้ว!
ในแอนิเมชั่นนี้ จะใช้คอนโทรลเลอร์เพื่อบังคับหุ่นยนต์ไปที่ลูกบาศก์สีแดง หยิบมันขึ้นมา จากนั้นยกลูกบาศก์ขึ้นมาและวางไว้บนลูกบาศก์สีน้ำเงิน แอนิเมชั่นนี้แสดงให้เห็นวิธีที่เป็นไปได้หนึ่งวิธีที่หุ่นยนต์ของคุณจะเคลื่อนไหวได้เพื่อดำเนินกิจกรรมฝึกฝนปรับปรุงแขนของคุณให้เสร็จสมบูรณ์
ใช้เอกสารนี้เป็นข้อมูลอ้างอิงในการดำเนินกิจกรรมการฝึกปฏิบัติ
เมื่อคุณทำกิจกรรมฝึกฝนปรับปรุงแขนของคุณเสร็จแล้ว ให้บันทึกสิ่งต่อไปนี้ลงในสมุดบันทึกวิศวกรรมของคุณ:
- อธิบายและแสดงภาพการออกแบบหุ่นยนต์ของคุณ
- การออกแบบกรงเล็บและแขนของคุณทำงานร่วมกันอย่างไรเพื่อให้กิจกรรมเสร็จสมบูรณ์?
- คุณจะทำซ้ำการออกแบบนี้เพื่อปรับปรุงประสิทธิภาพของหุ่นยนต์ได้อย่างไร
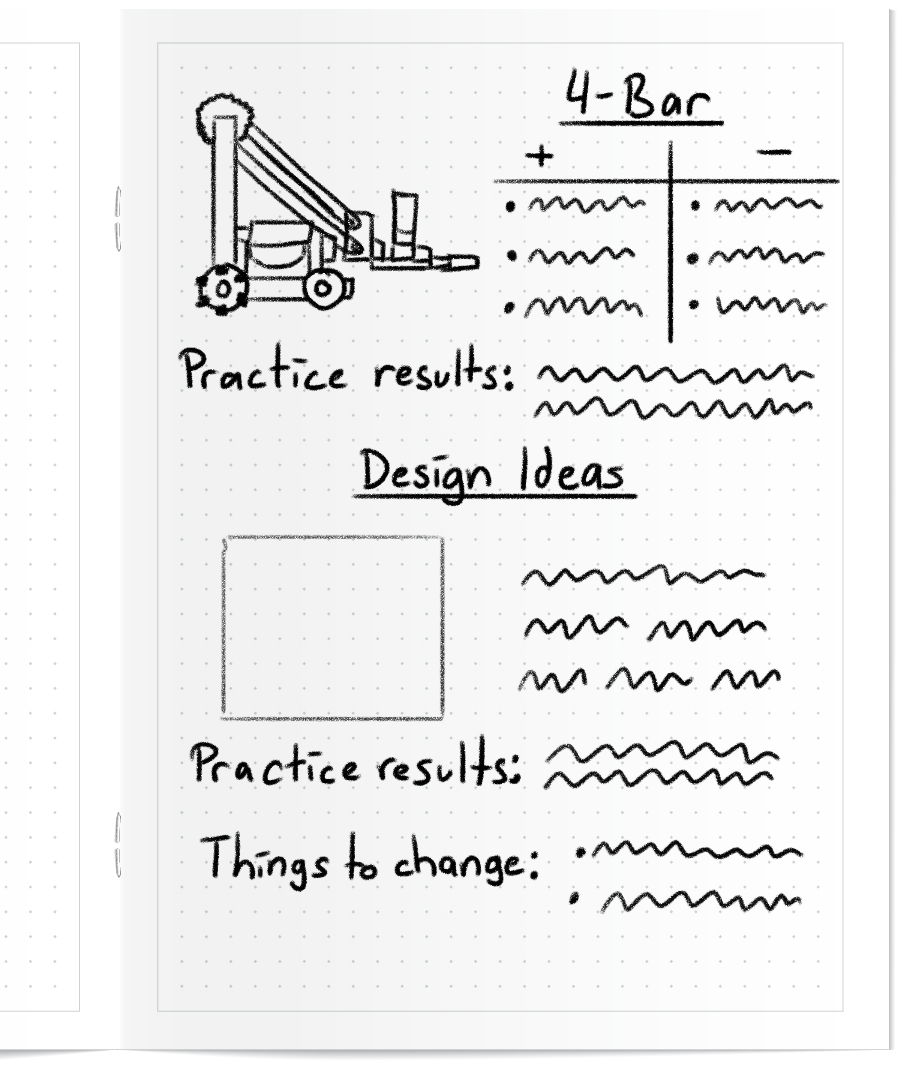
ดูภาพด้านซ้ายเพื่อดูตัวอย่างวิธีการบันทึกแนวคิดและการทดสอบการออกแบบของคุณ
การออกแบบแขน
ในส่วนการเรียนรู้ คุณจะได้เรียนรู้เกี่ยวกับการออกแบบแขนประเภทต่างๆ และได้ชมแอนิเมชั่นเหล่านี้ ในระหว่างวิดีโอ ใช้แอนิเมชั่นแขนด้านล่างนี้เพื่อใช้เป็นข้อมูลอ้างอิงขณะออกแบบแขนของคุณ
แขน 4 บาร์
แขนนี้ประกอบด้วยข้อต่อขนานที่ช่วยให้วัตถุที่ถูกยกขึ้นยังคงอยู่ในระดับเดียวกัน นี่คือการออกแบบแขนที่ใช้ในการแนะนำการสร้าง Clawbot ชมแอนิเมชันเพื่อดูการเคลื่อนไหวของ 4-Bar Arm
สวิงอาร์ม
แขนแกว่งถือเป็นแขนชนิดหนึ่งที่ประกอบง่ายที่สุด ปลายแขนจะโค้งเป็นรูปโค้งขณะที่เฟืองหมุน และสามารถผ่านด้านบนและไปสิ้นสุดที่อีกด้านหนึ่งของหุ่นยนต์ได้ ดังที่แสดงในแอนิเมชั่นนี้
แขนบาร์ 4 แฉกคู่
แขนนี้ใช้เวลาในการประกอบมากขึ้น แต่มีประโยชน์เมื่อต้องรักษาให้ตัวควบคุมปลายแขนอยู่ในระดับเดียวกันตลอดเวลาหรือต้องเอื้อมถึงที่สูงขึ้น แขน 4 บาร์ย้อนกลับคู่ประกอบด้วย 4 บาร์ด้านบนและด้านล่างที่มีส่วนแนวตั้งสองส่วน สามารถมองเห็นได้ในแอนิเมชั่นนี้
เตรียมพร้อมรับความท้าทาย
ในการแข่งขัน (ในหน้าถัดไป) คุณจะทดสอบการออกแบบแขนของคุณใน Stacked Up Challenge เรียนรู้วิธีแข่งขันในการท้าทาย ตรวจสอบความเข้าใจของคุณ จากนั้นฝึกฝนสำหรับการท้าทาย
เป้าหมายของความท้าทายนี้คือการใช้ตัวควบคุมเพื่อขับหุ่นยนต์ของคุณและวางลูกบาศก์ให้ได้มากที่สุดเท่าที่จะทำได้ภายในหนึ่งนาที
ชมแอนิเมชั่นนี้เพื่อดูตัวอย่างของ Clawbot ที่วางลูกบาศก์ซ้อนกันในการท้าทาย Stacked Up
ทำตามขั้นตอนในเอกสารนี้เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับวิธีการดำเนินการท้าทายนี้ให้สำเร็จ
ตรวจสอบความเข้าใจของคุณ
ก่อนจะเริ่มการท้าทาย ให้แน่ใจว่าคุณเข้าใจกฎและการตั้งค่าของการท้าทายแล้ว โดยการตอบคำถามในเอกสารด้านล่างนี้ในสมุดบันทึกวิศวกรรมของคุณ
คำถามตรวจสอบความเข้าใจของคุณ
หลังจากทำคำถามเสร็จแล้ว ลองฝึกฝนการท้าทายดู
เลือก ถัดไป > เพื่อแข่งขันใน Stacked Up Challenge