
Pratique
Dans la dernière section, vous avez appris les éléments d'un bras de robot et comment différents mécanismes de bras fonctionnent. Maintenant, vous allez appliquer ce que vous avez appris à itérer sur la version pour terminer l'activité de pratique Améliorer votre bras.
Dans cette activité, votre robot devra se rendre à un cube IQ, ramasser le cube et le soulever sur un autre cube pour faire une pile. Vous allez itérer sur la conception du bras pour améliorer la capacité de votre robot à empiler le cube. Regardez la vidéo ci-dessous pour voir comment vous pouvez appliquer ce que vous avez appris pour terminer l'activité pratique Améliorer votre bras.
Maintenant, c'est à votre tour de terminer l'activité pratique Améliorer votre bras !
Dans cette animation, un contrôleur est utilisé pour conduire le robot au cube rouge, le ramasser, puis soulever le cube et le placer sur le cube bleu. Cette animation montre une façon possible pour votre robot de se déplacer pour terminer l'activité d'entraînement Améliorer votre bras.
Utilisez ce document comme référence pour terminer l'activité de pratique.
Lorsque vous terminez l'activité pratique Améliorer votre bras, documentez ce qui suit dans votre cahier d'ingénierie :
- Décrivez et illustrez la conception de votre robot.
- Comment votre conception de griffe et de bras fonctionne-t-elle ensemble pour terminer l'activité ?
- Comment pouvez-vous itérer sur cette conception pour améliorer les performances du robot ?
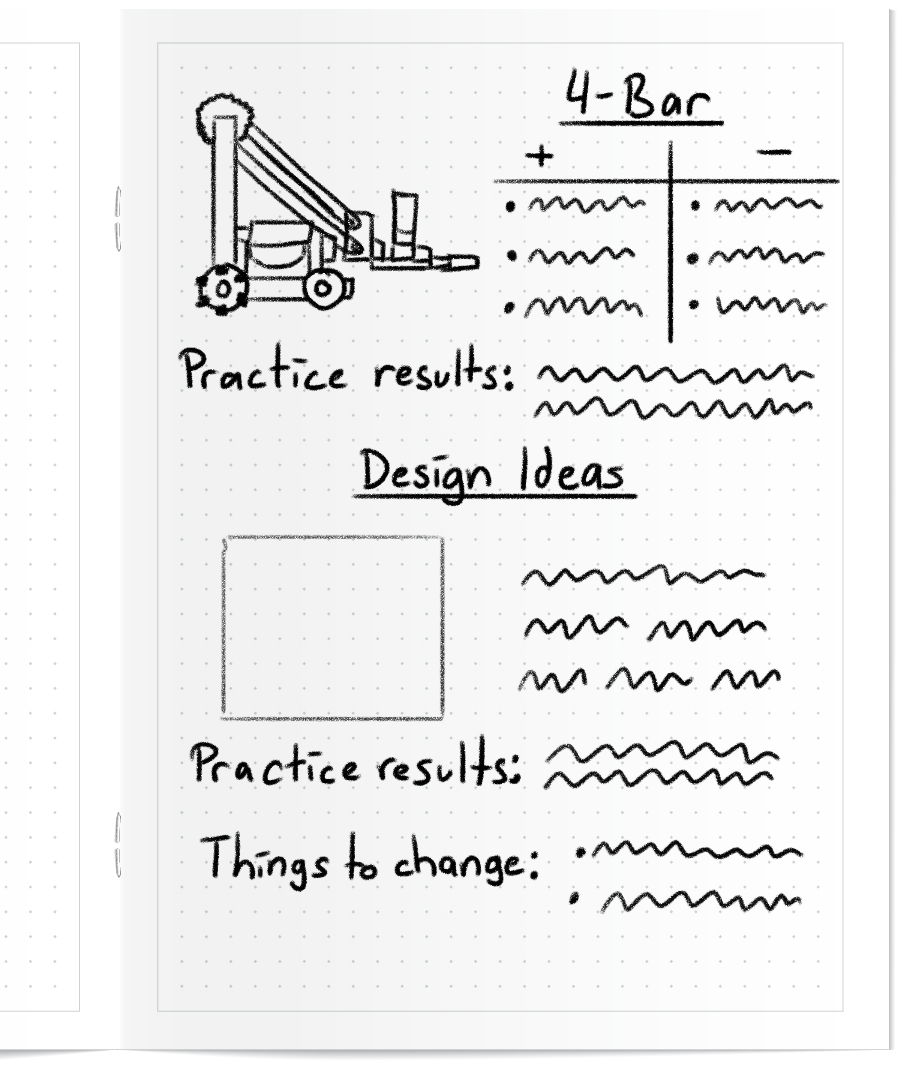
Voir l'image à gauche pour un exemple de la façon dont vous pouvez enregistrer vos idées de conception et vos tests.
Modèles de bras
Dans la section Apprendre, vous avez découvert différents types de conceptions de bras et on vous a montré ces animations pendant la vidéo. Utilisez ces animations de bras ci-dessous pour faire référence tout en itérant sur la conception de votre bras.
Bras à 4 barres
Ce bras est composé de liaisons parallèles qui permettent à l'objet en cours de levage de rester à niveau. Il s'agit de la conception de bras utilisée dans les instructions de construction de Clawbot. Regardez l'animation pour voir le mouvement du bras à 4 barres.
Bras oscillant
Un bras oscillant est l'un des bras les plus faciles à assembler. L'extrémité du bras suit un arc lorsque l'engrenage tourne et pourrait passer par-dessus et atteindre l'autre côté du robot comme le montre cette animation.
Double bras inversé à 4 barres
Ce bras prend plus de temps à assembler, mais est utile lorsque le manipulateur d'extrémité du bras doit être maintenu à niveau à tout moment ou pour atteindre plus haut. Le double bras inversé à 4 barres est composé d'une barre supérieure et d'une barre inférieure à 4 barres avec deux sections verticales, visibles dans cette animation.
Préparez-vous à relever le défi
Dans Compete (à la page suivante), vous testerez vos conceptions de bras dans le défi Stacked Up. Apprenez à participer au défi, vérifiez votre compréhension, puis entraînez-vous pour le défi.
Le but de ce défi est d'utiliser le contrôleur pour conduire votre robot et empiler autant de cubes que possible en une minute.
Regardez cette animation pour voir un exemple de Clawbot empilant des cubes dans le Défi Empilé.
Suivez les étapes de ce document pour en savoir plus sur la façon de relever ce défi.
Vérifiez votre compréhension
Avant de commencer le défi, assurez-vous de comprendre les règles et la configuration du défi en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez vos questions de compréhension
Après avoir répondu aux questions, essayez de relever le défi.
Sélectionnez Suivant > pour participer au défi Stacked Up.