
Praktika
Paskutiniame skyriuje sužinojote apie roboto rankos elementus ir kaip veikia skirtingi rankų mechanizmai . Dabar taikysite tai, ką išmokote, kartodami kurdami, kad užbaigtumėte praktikos „Tobulinkite savo ranką“ veiklą.
Šioje veikloje jūsų robotas turės nuvažiuoti prie IQ kubo, pasiimti kubą ir pakelti jį ant kito kubo, kad sudarytų krūvą. Jūs pakartosite rankos dizainą, kad pagerintumėte savo roboto gebėjimą sukrauti kubą. Žiūrėkite žemiau esantį vaizdo įrašą, kad pamatytumėte, kaip pritaikyti tai, ką išmokote, užbaigdami praktikos „Tobulinti ranką“ veiklą.
Dabar jūsų eilė užbaigti praktikos „Tobulinkite savo ranką“ veiklą!
Šioje animacijoje valdiklis naudojamas robotui nuvesti prie raudono kubo, jį pakelti, tada pakelti kubą ir padėti ant mėlyno kubo. Šioje animacijoje parodytas vienas iš galimų būdų, kaip jūsų robotas galėtų pajudėti, kad užbaigtų pratimo „Tobulinti ranką“ veiklą.
Naudokite šį dokumentą kaip nuorodą, kad užbaigtumėte praktikos veiklą.
Baigdami „Tobulinti savo ranką“ praktikos veiklą, savo inžinerijos bloknote užregistruokite šiuos dalykus:
- Apibūdinkite ir iliustruokite savo roboto dizainą.
- Kaip jūsų nagų ir rankų dizainas veikia kartu, kad užbaigtumėte veiklą?
- Kaip galite pakartoti šį dizainą, kad pagerintumėte roboto našumą?
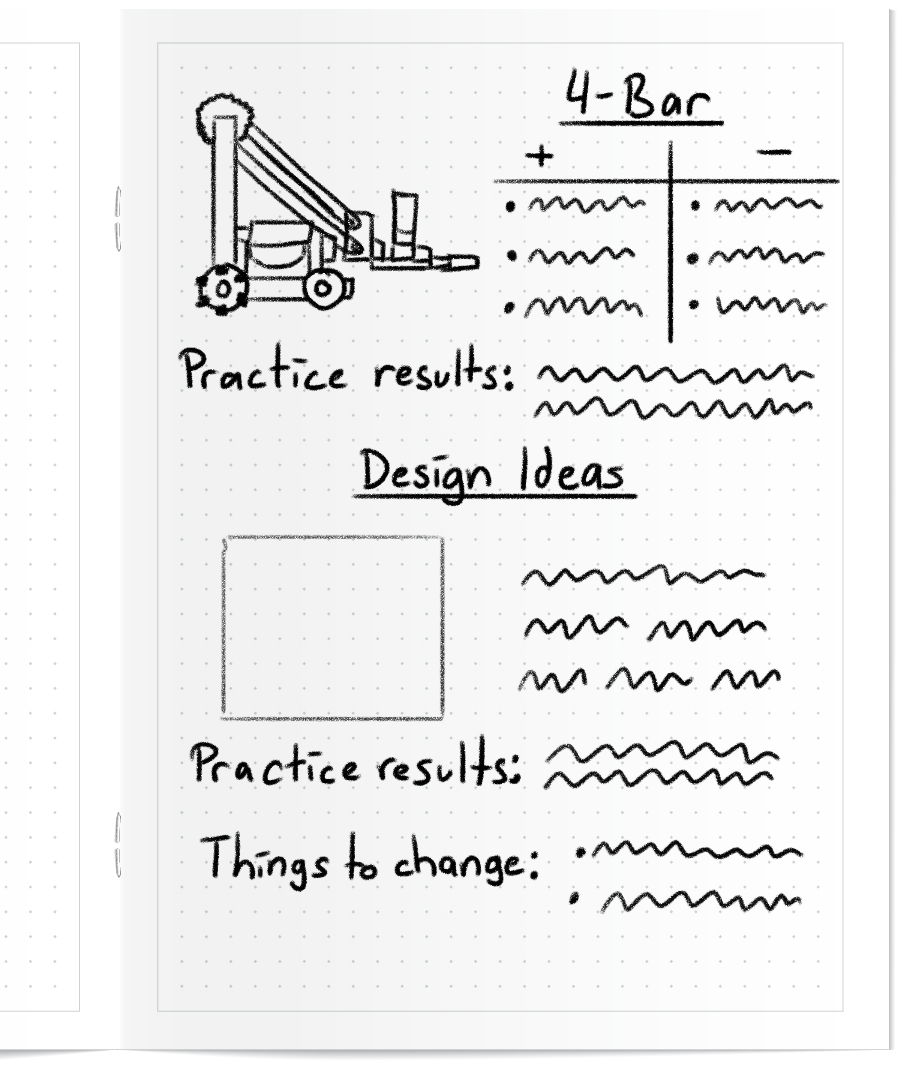
Pavyzdį, kaip galite įrašyti savo dizaino idėjas ir bandymus, rasite paveikslėlyje kairėje.
Rankų dizainas
Skiltyje „Mokytis“ sužinojote apie įvairius rankų dizaino tipus ir vaizdo įrašo metu jums buvo rodomos šios animacijos . Naudokite šias toliau pateiktas rankos animacijas, kad parodytumėte savo rankos dizainą.
4 strypų rankena
Ši ranka sudaryta iš lygiagrečių jungčių, leidžiančių keliamam objektui išlikti lygiai. Tai yra rankos dizainas, naudojamas „Clawbot“ kūrimo instrukcijose.
Sukamoji rankena
Sukamoji rankena yra viena iš lengviausiai surenkamų rankenų. Rankos galas seka lanką, kai pavara sukasi ir gali pereiti per viršų ir pasiekti kitą roboto pusę, kaip parodyta šioje animacijoje.
Dviguba atvirkštinė 4 strypų rankena
Šios rankos surinkimas užtrunka daugiau laiko, bet yra naudingas, kai galinį rankos manipuliatorių reikia visą laiką išlaikyti lygiai arba pasiekti aukščiau. Dviguba atvirkštinė 4 strypų rankena sudaryta iš viršutinės ir apatinės 4 strypų su dviem vertikaliomis dalimis, kurias galima pamatyti šioje animacijoje.
Pasiruoškite Iššūkiui
Skiltyje „Comete“ (kitame puslapyje) išbandysite savo rankų dizainą „Stacked Up Challenge“. Sužinokite, kaip konkuruoti iššūkyje, patikrinkite savo supratimą, tada pasirenkite iššūkiui.
Šio iššūkio tikslas yra valdyti savo robotą ir sukrauti kuo daugiau kubelių per minutę.
Žiūrėkite šią animaciją, kad pamatytumėte pavyzdį, kaip „Clawbot“ sukrauna kubus „Stacked Up Challenge“.
Atlikite šiame dokumente nurodytus veiksmus, kad sužinotumėte daugiau apie tai, kaip atlikti šį iššūkį.
Patikrinkite savo supratimą
Prieš pradėdami iššūkį, įsitikinkite, kad suprantate iššūkio taisykles ir sąranką, atsakydami į toliau pateiktame dokumente pateiktus klausimus savo inžinerijos bloknote.
Patikrinkite savo supratimo klausimus
Užpildę klausimus, pabandykite atlikti iššūkį.
Pasirinkite Kitas > ir dalyvaukite „Stacked Up Challenge“ varžybose.