
練習する
前のセクションでは、ロボット アームの要素と、さまざまなアームのメカニズム ように機能するかを学びました。 ここで、学んだことを適用してビルドを繰り返し、「腕を改善する」練習アクティビティを完了します。
このアクティビティでは、ロボットが IQ キューブまで運転し、 キューブを拾い上げて、別のキューブの上に持ち上げて積み重ねる必要があります。 アームの設計を繰り返して、立方体を積み重ねるロボットの能力を向上させます。 以下のビデオを見て、腕の向上の練習アクティビティを完了するために学んだことをどのように適用できるかを確認してください。
次は、腕を鍛える練習アクティビティを完了する番です。
このアニメーションでは、コントローラーを使用してロボットを赤い立方体まで動かし、それを持ち上げ、立方体を持ち上げて青い立方体の上に置きます。 このアニメーションは、腕の向上の練習アクティビティを完了するためにロボットが移動できる 1 つの可能な方法を示しています。
この文書を参考として使用して、練習アクティビティを完了してください。
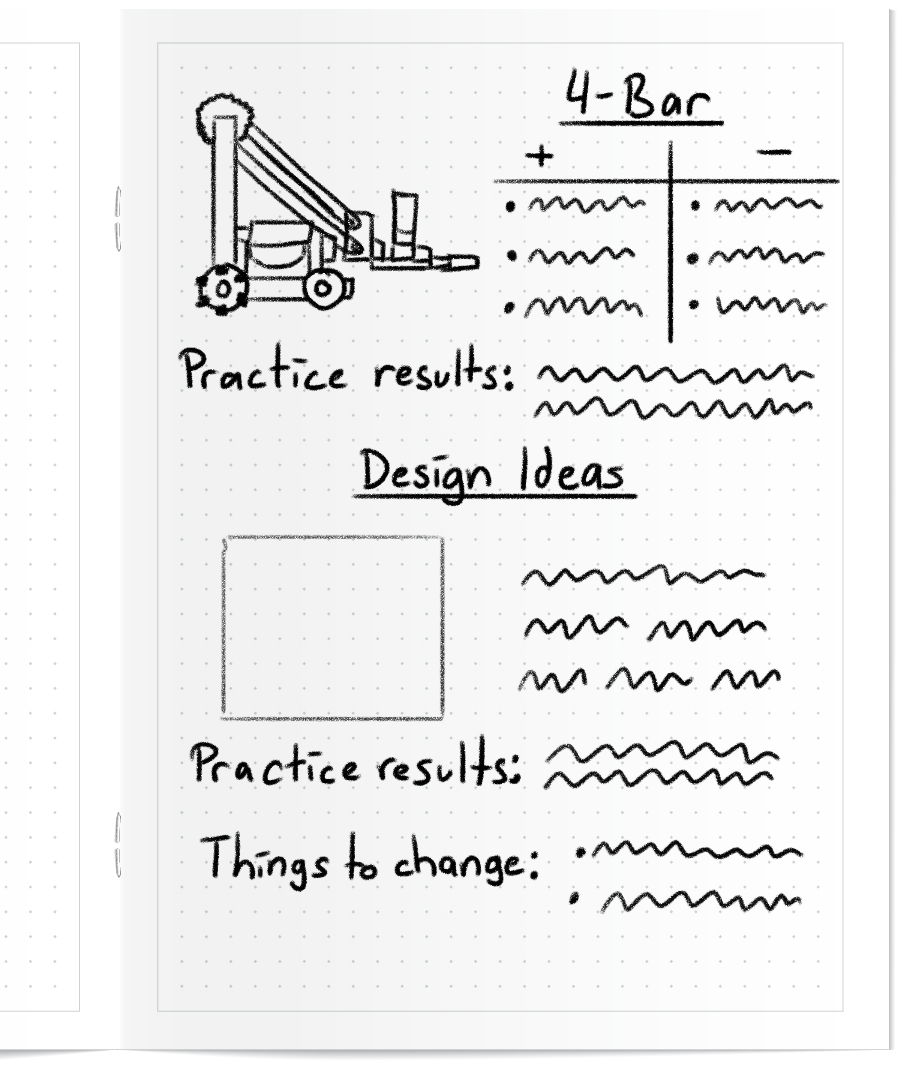
「腕の向上」の練習アクティビティを完了したら、エンジニアリング ノートに次のことを文書化します。
- ロボットの設計を説明して図解してください。
- 爪と腕のデザインはどのように連携してアクティビティを完了しますか?
- ロボットのパフォーマンスを向上させるために、この設計をどのように反復できるでしょうか?
設計のアイデアとテストを記録する方法の例については、左側の画像を参照してください。
アームのデザイン
「学習」セクションでは、さまざまなタイプのアームのデザインについて学び、ビデオ中に のアニメーションが表示されました。 以下の腕のアニメーションを使用して、腕のデザインを反復する際の参考にしてください。
4バーアーム
このアームは平行リンクで構成されており、持ち上げられる物体を水平に保つことができます。 これは、Clawbot の組み立て説明書で使用されるアームのデザインです。
スイングアーム
スイングアームは組み立てが最も簡単なアームの 1 つです。 このアニメーションに示されているように、ギアが回転するとアームの端が円弧を描き、ロボットの上部を通過して反対側に到達する可能性があります。
ダブルリバース4バーアーム
このアームは組み立てに時間がかかりますが、アームの先端マニピュレーターを常に水平に保つ必要がある場合や、より高い位置に到達させる必要がある場合に便利です。 ダブル リバース 4 バー アームは、2 つの垂直セクションを持つ上下の 4 バーで構成されており、このアニメーションで見ることができます。
チャレンジの準備をする
Compete (次のページ) では、Stacked Up Challenge でアームのデザインをテストします。 チャレンジに参加する方法を学び、理解度を確認してから、チャレンジに向けて練習してください。