
Praktik
Pada bagian terakhir, Anda mempelajari tentang elemen lengan robot dan cara kerja berbagai mekanisme lengan. Sekarang, Anda akan menerapkan apa yang telah Anda pelajari untuk mengulangi pembangunan guna menyelesaikan aktivitas latihan Tingkatkan Lengan Anda.
Dalam aktivitas ini, robot Anda harus melaju ke IQ Cube, mengambil cube tersebut, dan mengangkatnya ke atas cube lain untuk membuat tumpukan. Anda akan mengulangi desain lengan untuk meningkatkan kemampuan robot Anda dalam menumpuk kubus. Tonton video di bawah ini untuk melihat bagaimana Anda dapat menerapkan apa yang telah Anda pelajari untuk menyelesaikan aktivitas latihan Tingkatkan Lengan Anda.
Sekarang giliran Anda untuk menyelesaikan aktivitas latihan Tingkatkan Lengan Anda!
Dalam animasi ini, Clawbot menghadapi kubus merah dan biru yang diposisikan di persimpangan garis hitam tengah di Lapangan. Pengendali digunakan untuk menggerakkan robot ke kubus merah, mengambilnya, lalu mengangkat kubus tersebut dan meletakkannya di atas kubus biru. Animasi ini menunjukkan satu kemungkinan cara robot Anda bergerak untuk menyelesaikan aktivitas latihan Tingkatkan Lengan Anda.
Gunakan dokumen ini sebagai referensi untuk menyelesaikan aktivitas latihan.
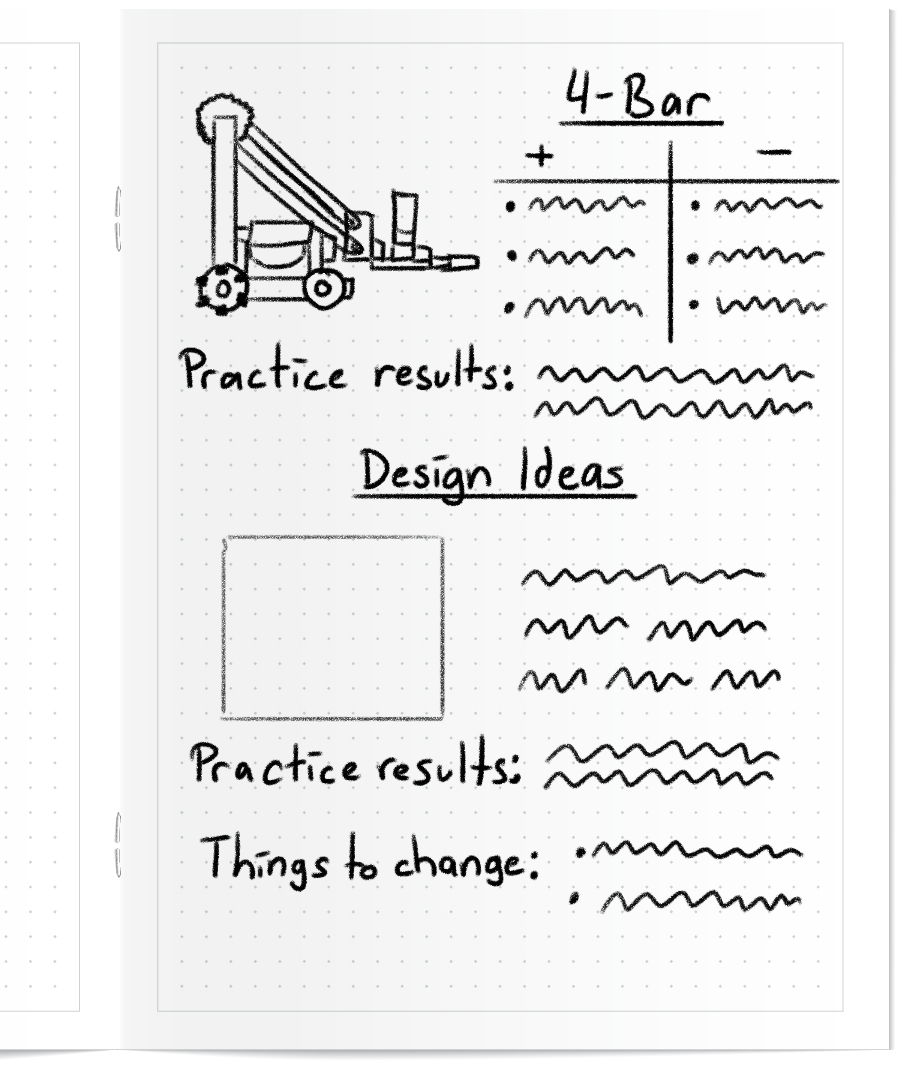
Saat Anda menyelesaikan aktivitas praktik Tingkatkan Lengan Anda, dokumentasikan hal berikut di buku catatan teknik Anda:
- Jelaskan dan ilustrasikan desain robot Anda.
- Bagaimana desain cakar dan lengan Anda bekerja sama untuk menyelesaikan aktivitas?
- Bagaimana Anda dapat mengulangi desain ini untuk meningkatkan kinerja robot?
Lihat gambar di sebelah kiri untuk contoh bagaimana Anda dapat merekam ide desain dan pengujian Anda.
Desain Lengan
Di bagian Pelajari, Anda mempelajari berbagai jenis desain lengan dan diperlihatkan animasi ini selama video. Gunakan animasi lengan di bawah ini sebagai referensi saat mengulang desain lengan Anda.
Lengan 4-Bar
Lengan ini terbuat dari hubungan paralel yang memungkinkan objek yang diangkat tetap rata. Ini adalah desain lengan yang digunakan dalam petunjuk pembuatan Clawbot. Saksikan animasi untuk melihat pergerakan Lengan 4-Bar.
Lengan Ayun
Lengan ayun adalah salah satu lengan yang paling mudah untuk dirakit. Ujung lengan mengikuti busur saat roda gigi berputar dan dapat melewati bagian atas dan mencapai sisi lain robot seperti yang ditunjukkan dalam animasi ini.
Lengan 4-Bar Terbalik Ganda
Lengan ini memerlukan waktu lebih lama untuk dirakit, tetapi berguna saat manipulator ujung lengan perlu dijaga tetap rata setiap saat atau harus dijangkau lebih tinggi. Lengan 4 palang ganda terbalik terdiri dari 4 palang atas dan bawah dengan dua bagian vertikal, yang dapat dilihat dalam animasi ini.
Bersiap untuk Tantangan
Dalam Compete (di halaman berikutnya), Anda akan menguji desain lengan Anda dalam Stacked Up Challenge. Pelajari cara berkompetisi dalam tantangan tersebut, periksa pemahaman Anda, lalu berlatihlah untuk tantangan tersebut.
Tonton animasi ini untuk melihat contoh Clawbot yang menumpuk kubus dalam Tantangan Bertumpuk. Dalam animasi ini, Clawbot dimulai di bagian tengah dinding bawah di Lapangan. Ada tiga kubus biru di tiga persimpangan garis hitam di seberang robot, dan dua kubus merah di persimpangan garis hitam di kiri dan kanan tengah Lapangan. Saat penghitung waktu mundur dimulai, robot akan bergerak terlebih dahulu dan berbelok ke kiri untuk mengambil kubus merah, lalu bergerak untuk menumpuknya di atas kubus biru di sudut kiri. Kemudian berbalik dan bergerak ke kubus merah sebelah kanan, dan mencoba menumpuknya ke kubus biru tengah. Pada detik-detik terakhir, robot menumpuk kubus biru sudut kanan ke tumpukan tengah.
Periksa Pemahaman Anda
Sebelum memulai tantangan, pastikan Anda memahami aturan dan pengaturan tantangan dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda
Setelah menyelesaikan pertanyaan, cobalah berlatih tantangannya.
Pilih Berikutnya > untuk bersaing dalam Tantangan Stacked Up.