
Esplorazione del controller - Parte 1
![]() Toolbox per l'insegnante
-
Schema dell'attività
Toolbox per l'insegnante
-
Schema dell'attività
- Questa esplorazione introdurrà gli studenti ai comportamenti di Clawbot che possono essere programmati per funzionare con un controller:
- Introduci i blocchi [Per sempre], [Imposta velocità motore] e [Spin]
- Esegui un rapido controllo di risoluzione dei problemi per verificare che Clawbot sia pronto
- Apri VEXcode IQ
- Costruisci un semplice progetto fornito all'interno della lezione
- Scarica e esegui il progetto
- Fate fare pratica agli studenti usando il Controller
- Concludere l'attività con una discussione
- Utilizzando il modello Clawbot con Controller, gli studenti possono controllare il Clawbot tramite il Controller. In VEXcode IQ sono disponibili quattro blocchi diversi, che possono essere utilizzati per controllare i motori del Clawbot. Gli studenti dovranno regolare i parametri nei blocchi [Imposta velocità motore], [Rotazione] e (posizione del controller) per controllare la velocità di ciascuno dei motori del Clawbot e consentire al controller di controllare le funzioni del motore.
-
Per maggiori informazioni sulla programmazione del Controller, fare clic sotto.
- Come attività per l'intera classe, rivedere i blocchi di programmazione con gli studenti. Informa gli studenti che in VEXcode IQ sono disponibili quattro blocchi diversi, che possono essere utilizzati per controllare i motori del Clawbot. Gli studenti dovranno regolare i parametri nei blocchi [Imposta velocità motore], [Rotazione] e (posizione del controller) per controllare la velocità di ciascuno dei motori del Clawbot e consentire al controller di controllare le funzioni del motore.
Clawbot è pronto per essere programmato con il Controller! Questa esplorazione ti fornirà gli strumenti per programmare alcuni movimenti di base all'interno di un progetto.
VEXcode IQ che verrà utilizzato in questa esplorazione:
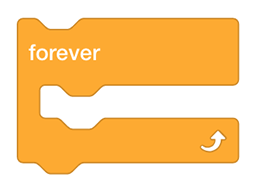
- Blocco [Per sempre]: questo blocco ripete all'infinito un insieme di blocchi. È possibile uscire da un ciclo [Forever] solo utilizzando un blocco break o arrestando il programma. Il blocco [Per sempre] non smetterà di ripetersi a meno che al suo interno non venga inserito un blocco di interruzione.
- Ecco un esempio di un blocco [Break] utilizzato per uscire da un ciclo [Forever].
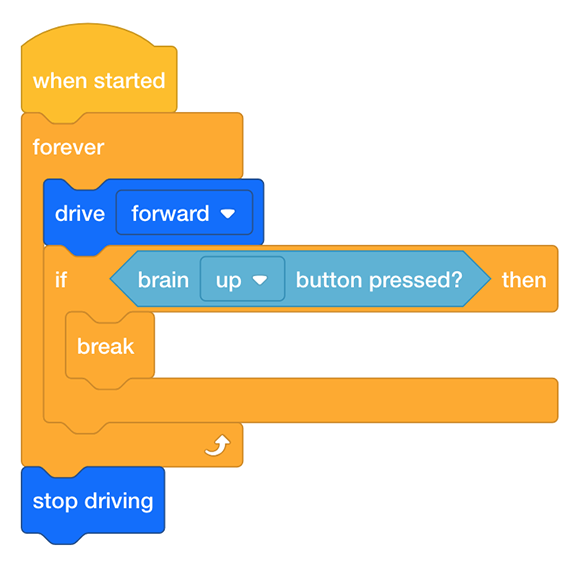
- Ecco un esempio di un blocco [Break] utilizzato per uscire da un ciclo [Forever].
- Il blocco [Imposta velocità motore] imposta la velocità del motore.

- La velocità può essere impostata in percentuale o in giri al minuto:
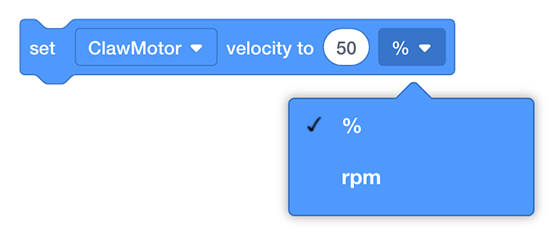
- La velocità può essere impostata in percentuale o in giri al minuto:
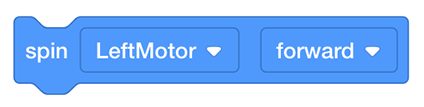
- Il blocco [Spin] fa girare un motore finché non si ferma. Il motore si fermerebbe arrestando il programma.
- Il blocco (posizione del controller) riporta la posizione del joystick sul controller lungo un asse. Il joystick inizia con 0 quando è centrato sull'asse.
- Questo blocco consentirà al Controller di determinare la velocità di un motore. Per farlo, trascina questo blocco dalla Casella degli strumenti sulla velocità nel blocco [Imposta velocità motore]; questo sostituirà la velocità predefinita con la posizione del Controller di tua scelta.
Per ulteriori informazioni su uno di questi blocchi, apri la Guida e seleziona il/i blocco/i su cui hai domande.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
- Se è la prima volta che gli studenti utilizzano VEXcode IQ, possono fare riferimento ai Tutorial in qualsiasi momento durante questa esplorazione. I tutorial si trovano nella barra degli strumenti.

- Assicurati che ogni gruppo di studenti abbia tutto il materiale necessario.
![]() Toolbox per l'insegnante
-
Ruoli di esplorazione degli studenti
Toolbox per l'insegnante
-
Ruoli di esplorazione degli studenti
Per ricevere assistenza nell'organizzazione degli studenti per questa attività, clicca qui sotto.
Il costruttore di ogni gruppo dovrebbe procurarsi l'hardware necessario. Il verbalizzatore dovrebbe ricevere il quaderno di ingegneria del gruppo. Il programmatore dovrebbe aprire VEXcode IQ.
| Quantità | Materiali necessari |
|---|---|
| 1 |
Artigliobot |
| 1 |
Batteria carica del robot VEX IQ |
| 1 |
Radio VEX IQ |
| 1 |
Controllore |
| 1 |
Cavo di ancoraggio |
| 1 |
QI codice VEX |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Quaderno di ingegneria |