
Exploración del controlador - Parte 1
![]() Caja de herramientas para maestros
- Esquema
de la actividad
Caja de herramientas para maestros
- Esquema
de la actividad
- Esta exploración presentará a los estudiantes los comportamientos de Clawbot que se pueden programar para operar con un controlador:
- Introduzca los bloques [Forever], [Set motor velocity] y [Spin]
- Realice una rápida comprobación de resolución de problemas de que el Clawbot está listo
- Abrir VEXcode IQ
- Construir un proyecto simple proporcionado dentro de la lección
- Descargar y ejecutar el proyecto
- Haga que los estudiantes practiquen con el controlador
- Termina la actividad con una discusión
- El uso de la plantilla Clawbot con controlador permite a los estudiantes controlar el Clawbot usando el controlador. Hay cuatro bloques diferentes disponibles en VEXcode IQ, que se pueden utilizar para controlar los motores del Clawbot. Los estudiantes deberán ajustar los parámetros en los bloques [Establecer velocidad del motor], [Girar] y (posición del controlador) para controlar la velocidad de cada uno de los motores del Clawbot y permitir que el controlador controle las funciones del motor.
-
Para obtener más información sobre la programación del controlador, haga clic a continuación.
Google Doc / .docx / .pdf
- Como actividad de toda la clase, revise los bloques de programación con los estudiantes. Indique a los estudiantes que hay cuatro bloques diferentes disponibles en VEXcode IQ, que se pueden utilizar para controlar los motores del Clawbot. Los estudiantes deberán ajustar los parámetros en los bloques [Establecer velocidad del motor], [Girar] y (posición del controlador) para controlar la velocidad de cada uno de los motores del Clawbot y permitir que el controlador controle las funciones del motor.
¡Clawbot está listo para programar con el controlador! Esta exploración te dará las herramientas para poder programar algunos movimientos básicos dentro de un proyecto.
VEXcode IQ que se utilizará en esta exploración:
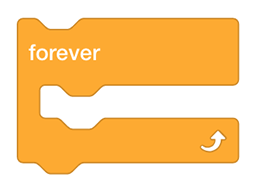
- El bloque [Forever]: este bloque enlaza un conjunto de bloques para siempre. Solo se puede salir de un bucle [Forever] utilizando un bloque de interrupción o deteniendo el programa. El bloque [Forever] no dejará de repetirse a menos que se coloque un bloque de ruptura dentro de él.
- Aquí hay un ejemplo de un bloque [Break] que se utiliza para salir de un bucle [Forever].
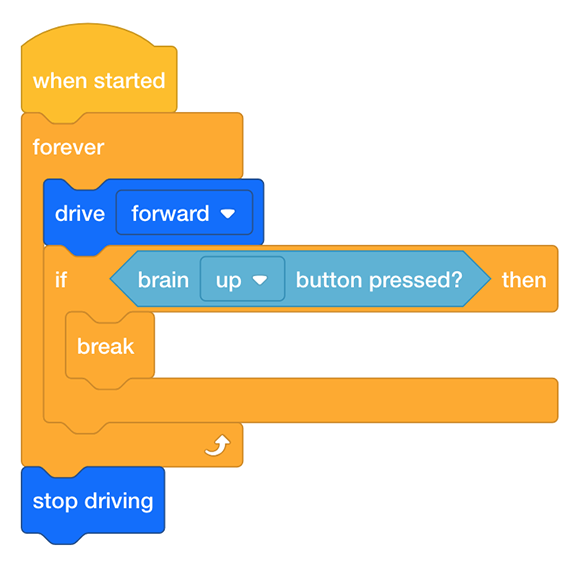
- Aquí hay un ejemplo de un bloque [Break] que se utiliza para salir de un bucle [Forever].
- Los bloques [Set motor velocity] establecen la velocidad del motor.

- La velocidad se puede establecer en porcentaje o rpm:
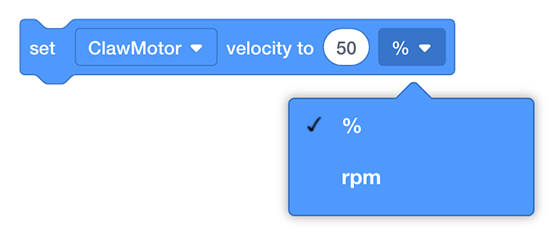
- La velocidad se puede establecer en porcentaje o rpm:
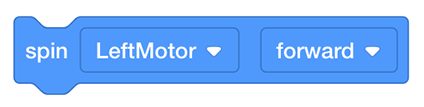
- El bloque [Spin] hace girar un motor hasta que se detiene. El motor se detendría deteniendo el programa.
- El bloque (posición del controlador) informa la posición del joystick en el controlador a lo largo de un eje. El joystick es 0 cuando está centrado en el eje.
- Este bloque permitirá al controlador determinar la velocidad de un motor. Para hacerlo, arrastre este bloque desde la Caja de herramientas sobre la velocidad en el bloque [Establecer velocidad del motor]; esto reemplazará la velocidad predeterminada con la posición del controlador de su elección.
Para obtener más información sobre cualquiera de estos bloques, abra la Ayuda y seleccione los bloques sobre los que tiene preguntas.
![]() Consejos para profesores
Consejos para profesores
- Si esta es la primera vez que los estudiantes usan VEXcode IQ, pueden consultar los tutoriales en cualquier momento durante esta exploración. Los tutoriales se encuentran en la barra de herramientas.

- Asegúrese de que cada grupo de estudiantes tenga todos los materiales necesarios.
![]() Caja de herramientas para maestros
- Roles de exploración de los
estudiantes
Caja de herramientas para maestros
- Roles de exploración de los
estudiantes
Para obtener ayuda para organizar a los estudiantes para esta actividad, haga clic a continuación.
Google Doc / .docx / .pdf
El constructor de cada grupo debe obtener el hardware necesario. El registrador debe obtener el cuaderno de ingeniería del grupo. El programador debe abrir VEXcode IQ.
| Cantidad | Materiales necesarios |
|---|---|
| 1 |
Clawbot |
| 1 |
Batería robótica VEX IQ cargada |
| 1 |
VEX IQ Radio |
| 1 |
Responsable |
| 1 |
Cable de amarre |
| 1 |
VEXcode IQ |
| 1 |
Cable USB (si utiliza un ordenador) |
| 1 |
Cuaderno de ingeniería |