
컨트롤러 탐색 - 1부
![]() 교사 도구 상자
-
활동 개요
교사 도구 상자
-
활동 개요
- 이 탐구는 학생들에게 컨트롤러로 작동하도록 프로그래밍할 수 있는 Clawbot 동작을 소개합니다.
- [Forever], [Set motor velocity], [Spin] 블록 소개
- Clawbot이 준비되었는지 간단한 문제 해결을 수행합니다.
- VEXcode IQ 열기
- 수업 내에서 제공되는 간단한 프로젝트 만들기
- 프로젝트 다운로드 및 실행
- 학생들에게 컨트롤러 사용 연습을 시키도록 합니다.
- 토론으로 활동 마무리하기
- Clawbot with Controller 템플릿을 사용하면 학생들이 컨트롤러를 사용하여 Clawbot을 제어할 수 있습니다. VEXcode IQ에는 Clawbot의 모터를 제어하는 데 사용할 수 있는 네 가지 블록이 있습니다. 학생들은 Clawbot의 각 모터에 대한 속도를 제어하고 컨트롤러가 모터 기능을 제어할 수 있도록 [모터 속도 설정], [스핀] 및 (컨트롤러 위치) 블록의 매개 변수를 조정해야 합니다.
-
컨트롤러 프로그래밍에 대한 자세한 내용을 보려면 아래를 클릭하십시오.
Google Doc / .docx / .pdf
- 전체 수업 활동으로 학생들과 함께 프로그래밍 블록을 검토한다. 학생들에게 VEXcode IQ에는 Clawbot의 모터를 제어하는 데 사용할 수 있는 네 가지 블록이 있다고 말합니다. 학생들은 Clawbot의 각 모터에 대한 속도를 제어하고 컨트롤러가 모터 기능을 제어할 수 있도록 [모터 속도 설정], [스핀] 및 (컨트롤러 위치) 블록의 매개 변수를 조정해야 합니다.
Clawbot은 컨트롤러로 프로그래밍할 준비가 되었습니다! 이 탐색을 통해 프로젝트 내에서 몇 가지 기본 동작을 프로그래밍할 수 있는 도구를 얻을 수
있습니다. 이 탐사에 사용될 VEXcode IQ:
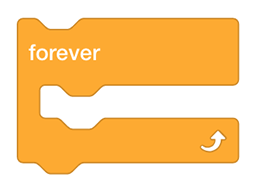
- [Forever] 블록 - 이 블록은 일련의 블록을 영원히 루프합니다. [Forever] 루프는 브레이크 블록을 사용하거나 프로그램을 중지해야만 종료할 수 있습니다. [Forever] 블록은 내부에 브레이크 블록이 배치되지 않는 한 반복을 멈추지 않습니다.
- 다음은 [Forever] 루프를 종료하는 데 사용되는 [Break] 블록의 예입니다.
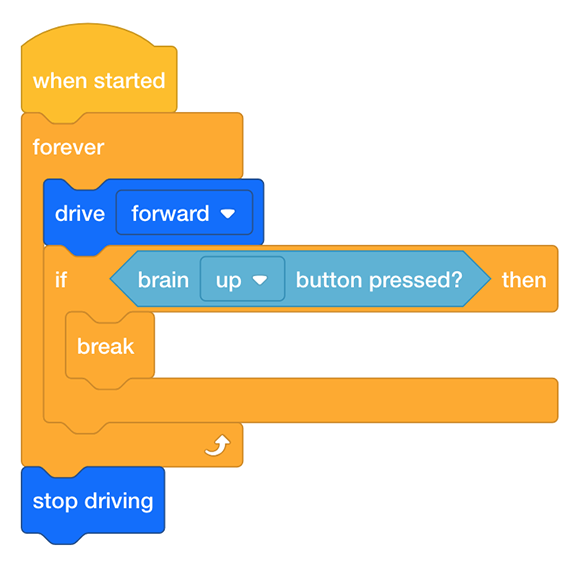
- 다음은 [Forever] 루프를 종료하는 데 사용되는 [Break] 블록의 예입니다.
- [모터 속도 설정] 블록은 모터의 속도를 설정합니다.

- 속도는 퍼센트 또는 RPM으로 설정할 수 있습니다:
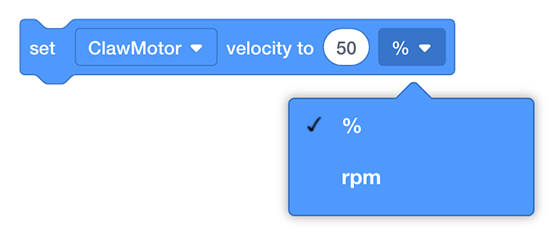
- 속도는 퍼센트 또는 RPM으로 설정할 수 있습니다:
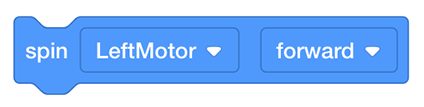
- [스핀] 블록은 정지할 때까지 모터를 회전합니다. 프로그램을 중지하면 모터가 정지됩니다.
- (컨트롤러 위치) 블록은 축을 따라 컨트롤러의 조이스틱 위치를 보고합니다. 조이스틱은 축을 중심으로 할 때 0이 됩니다.
- 이 블록을 통해 컨트롤러는 모터의 속도를 결정할 수 있습니다. 이렇게 하려면 도구 상자에서 이 블록을 [모터 속도 설정] 블록의 속도 위로 드래그합니다. 그러면 기본 속도가 선택한 컨트롤러 위치로 대체됩니다.
이러한 블록에 대한 자세한 내용을 보려면 도움말을 열고 질문이 있는 블록을 선택하세요.
![]() 교사 팁
교사 팁
- 학생들이 VEXcode IQ를 처음 사용하는 경우, 이 탐구 중에 언제든지 튜토리얼을 참조할 수 있습니다. 튜토리얼은 툴바에 있습니다.

- 각 학생 그룹에 필요한 모든 자료가 있는지 확인한다.
![]() 교사 도구 상자
-
학생의 탐구 역할
교사 도구 상자
-
학생의 탐구 역할
이 활동을 위해 학생들을 조직하는 데 도움이 필요하면 아래를 클릭하십시오.
Google Doc / .docx / .pdf
각 그룹의 Builder는 필요한 하드웨어를 가져와야 합니다. 레코더는 그룹의 엔지니어링 노트북을 가져와야 합니다. 프로그래머는 VEXcode IQ를 열어야 합니다.
필요한 재료:
| 수량 | 필요한 재료 |
|---|---|
| 1 |
클로봇 |
| 1 |
충전된 VEX IQ 로봇 배터리 |
| 1 |
VEX IQ 라디오 |
| 1 |
컨트롤러 |
| 1 |
테더 케이블 |
| 1 |
VEXcode IQ |
| 1 |
USB 케이블 (컴퓨터를 사용하는 경우) |
| 1 |
엔지니어링 노트 |