
Exploration du contrôleur - Partie 1
![]() Boîte à outils de l'enseignant
- Aperçu
de l'activité
Boîte à outils de l'enseignant
- Aperçu
de l'activité
- Cette exploration présentera aux élèves les comportements de Clawbot qui peuvent être programmés pour fonctionner avec un contrôleur :
- Présentez les blocs [Forever], [Set motor velocity] et [Spin]
- Effectuez un dépannage rapide pour vérifier que le Clawbot est prêt
- Ouvrir VEXcode IQ
- Construire un projet simple fourni dans la leçon
- Télécharger et exécuter le projet
- Demandez aux élèves de s'entraîner à utiliser le contrôleur
- Terminez l'activité par une discussion
- L'utilisation du modèle Clawbot avec contrôleur permet aux étudiants de contrôler le Clawbot à l'aide du contrôleur. Il existe quatre blocs différents disponibles dans VEXcode IQ, qui peuvent être utilisés pour contrôler les moteurs du Clawbot. Les étudiants devront ajuster les paramètres des blocs [Définir la vitesse du moteur], [Tourner] et (position du contrôleur) pour contrôler la vitesse de chacun des moteurs du Clawbot et permettre au contrôleur de contrôler les fonctions du moteur.
-
Pour plus d'informations sur la programmation du contrôleur, cliquez ci-dessous.
Google Doc / .docx / .pdf
- En classe, passez en revue les blocs de programmation avec les élèves. Dites aux élèves qu'il y a quatre blocs différents disponibles dans VEXcode IQ, qui peuvent être utilisés pour contrôler les moteurs du Clawbot. Les étudiants devront ajuster les paramètres des blocs [Définir la vitesse du moteur], [Tourner] et (position du contrôleur) pour contrôler la vitesse de chacun des moteurs du Clawbot et permettre au contrôleur de contrôler les fonctions du moteur.
Clawbot est prêt pour la programmation avec le contrôleur ! Cette exploration vous donnera les outils pour pouvoir programmer quelques mouvements de base au sein d'un projet.
VEXcode IQ qui sera utilisé dans cette exploration :
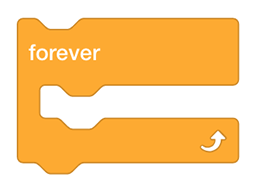
- Le bloc [Forever] : ce bloc boucle un ensemble de blocs pour toujours. Une boucle [Forever] ne peut être quittée qu'en utilisant un bloc de rupture ou en arrêtant le programme. Le bloc [Forever] ne cessera pas de se répéter à moins qu'un bloc de rupture ne soit placé à l'intérieur.
- Voici un exemple d'un bloc [Break] utilisé pour quitter une boucle [Forever].
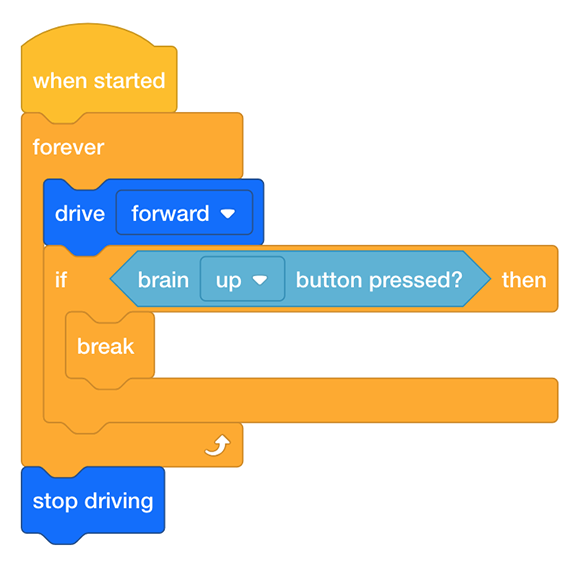
- Voici un exemple d'un bloc [Break] utilisé pour quitter une boucle [Forever].
- Les blocs [Réglage de la vitesse du moteur] règlent la vitesse du moteur.

- La vitesse peut être réglée sur pourcentage ou tr/min :
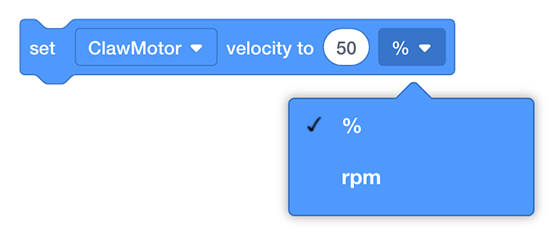
- La vitesse peut être réglée sur pourcentage ou tr/min :
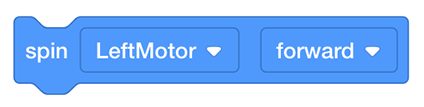
- Le bloc [Spin] fait tourner un moteur jusqu'à l'arrêt. Le moteur serait arrêté en arrêtant le programme.
- Le bloc (position du contrôleur) signale la position du joystick sur le contrôleur le long d'un axe. Le joystick est à 0 lorsqu'il est centré sur l'axe.
- Ce bloc permettra au contrôleur de déterminer la vitesse d'un moteur. Pour ce faire, faites glisser ce bloc de la boîte à outils sur la vitesse dans le bloc [Définir la vitesse du moteur] ; cela remplacera la vitesse par défaut par la position du contrôleur de votre choix.
Pour en savoir plus sur l'un de ces blocs, ouvrez l'aide et sélectionnez le (s) bloc(s) à propos duquel (desquels) vous avez des questions.
![]() Conseils à l'enseignant
Conseils à l'enseignant
- Si c'est la première fois que les étudiants utilisent VEXcode IQ, ils peuvent faire référence aux tutoriels à tout moment au cours de cette exploration. Les didacticiels se trouvent dans la barre d'outils.

- Assurez-vous que chaque groupe d'étudiants dispose de tout le matériel nécessaire.
![]() Boîte à outils de l'enseignant
- Rôles d'exploration des
étudiants
Boîte à outils de l'enseignant
- Rôles d'exploration des
étudiants
Pour obtenir de l'aide sur l'organisation des étudiants pour cette activité, cliquez ci-dessous.
Google Doc / .docx / .pdf
Le constructeur de chaque groupe doit obtenir le matériel requis. L'enregistreur doit obtenir le cahier d'ingénierie du groupe. Le programmeur doit ouvrir VEXcode IQ.
| Quantité | Matériel nécessaire |
|---|---|
| 1 |
Clawbot |
| 1 |
Batterie de robot VEX IQ chargée |
| 1 |
Radio VEX IQ |
| 1 |
Contrôleur |
| 1 |
Câble d'attache |
| 1 |
VEXcode IQ |
| 1 |
Câble USB (si vous utilisez un ordinateur) |
| 1 |
Carnet d'ingénierie |