
![]() 教師工具箱
-
活動大綱
教師工具箱
-
活動大綱
-
這次探索將向學生介紹 Clawbot 的行為,這些行為可以透過程式設計來與控制器一起操作:
-
使用帶有控制器模板的 Clawbot 使學生能夠使用控制器控制 Clawbot。 VEXcode IQ 中有四種不同的模組,可用於控制 Clawbot 的馬達。 學生需要調整 [設定馬達速度]、[旋轉] 和(控制器位置)區塊中的參數,以控制每個 Clawbot 馬達的速度並使控制器能夠控制馬達功能。
-
有關對控制器進行編程的更多信息,請單擊下面的 。
-
作為整個課堂活動,與學生一起複習程式設計模組。 告訴學生 VEXcode IQ 中有四種不同的模組,可用來控制 Clawbot 的馬達。 學生需要調整 [設定馬達速度]、[旋轉] 和(控制器位置)區塊中的參數,以控制每個 Clawbot 馬達的速度並使控制器能夠控制馬達功能。
Clawbot 已準備好使用控制器進行程式設計! 這種探索將為您提供能夠在專案中對一些基本動作進行程式設計的工具。
本次探索中將使用的 VEXcode IQ:
-
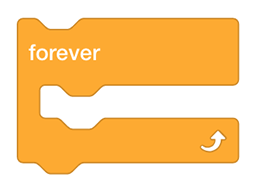
[Forever] 塊-該塊永遠循環一組塊。 [Forever] 循環只能透過使用中斷區塊或停止程序來退出。 [Forever] 區塊不會停止重複,除非在其內部放置了中斷區塊。
-
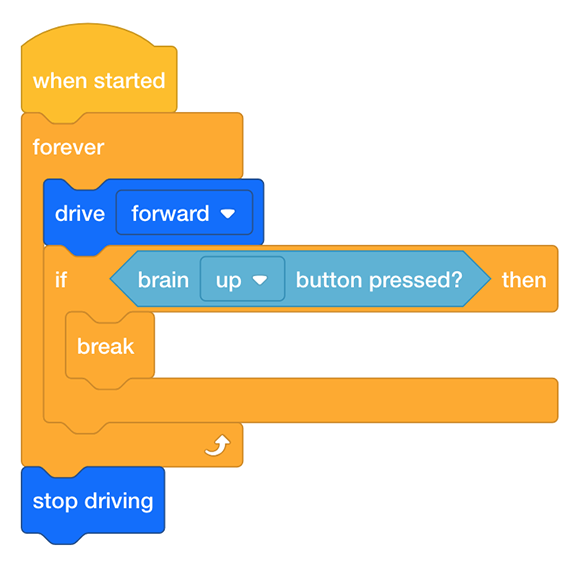
以下是使用 [Break] 區塊退出 [Forever] 循環的範例。
-
-
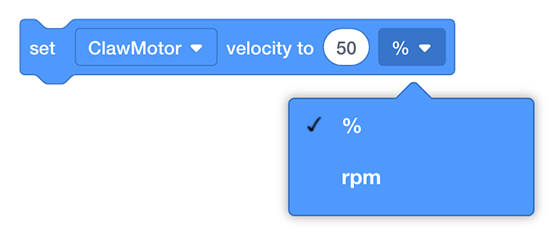
[設定馬達速度] 塊設定馬達的速度。

-
速度可以設定為百分比或 rpm:
-
-
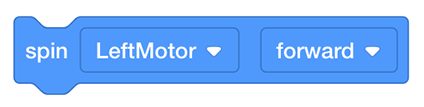
[Spin] 塊使馬達旋轉直至停止。 透過停止程序可以停止馬達。
-
(控制器位置)塊報告控制器上操縱桿沿軸的位置。 當操縱桿以軸為中心時,其值為 0。
-
該塊將使控制器能夠確定馬達的速度。 為此,請將此區塊從工具箱拖曳到 [Set motor Velocity] 區塊中的速度上;這將用您選擇的控制器位置替換預設速度。
-
要了解有關這些區塊的更多信息,請打開“幫助”,然後選擇您有疑問的區塊。
![]() 老師提示
老師提示
- 如果這是學生第一次使用 VEXcode IQ,他們可以在探索過程中隨時參考教學。 教學位於工具列中。

- 確保每個學生小組都有所有必要的材料。
每個組別中的建造者應該獲得所需的硬體。 記錄員應該拿到小組的工程筆記本。 程式設計師應該打開 VEXcode IQ。
| 數量 | 所需材料 |
|---|---|
| 1 |
爪機器人 |
| 1 |
已充電的 VEX IQ 機器人電池 |
| 1 |
VEX IQ 收音機 |
| 1 |
控制器 |
| 1 |
繫繩電纜 |
| 1 |
VEXcode IQ |
| 1 |
USB 連接線(如果使用電腦) |
| 1 |
工程筆記本 |