
![]() Opettajan työkalupakki
-
Tehtävän hahmotelma
Opettajan työkalupakki
-
Tehtävän hahmotelma
-
Tämä tutkimus esittelee opiskelijat Clawbotin käyttäytymiseen, joka voidaan ohjelmoida toimimaan ohjaimen kanssa:
-
Käyttämällä Clawbot with Controller -mallia, opiskelijat voivat ohjata Clawbotia ohjaimen avulla. VEXcode IQ:ssa on neljä erilaista lohkoa, joilla voidaan ohjata Clawbotin moottoreita. Opiskelijoiden on säädettävä parametreja [Set motor speed]-, [Spin]- ja (ohjaimen sijainti) -lohkoissa ohjatakseen kunkin Clawbotin moottorin nopeutta ja antaakseen ohjaimelle mahdollisuuden ohjata moottorin toimintoja.
-
Jos haluat lisätietoja ohjaimen ohjelmoinnista, napsauta alla.
-
Käy koko luokan aikana ohjelmointilohkot läpi oppilaiden kanssa. Kerro oppilaille, että VEXcode IQ:ssa on neljä erilaista lohkoa, joilla voidaan ohjata Clawbotin moottoreita. Opiskelijoiden on säädettävä parametreja [Set motor speed]-, [Spin]- ja (ohjaimen sijainti) -lohkoissa ohjatakseen kunkin Clawbotin moottorin nopeutta ja antaakseen ohjaimelle mahdollisuuden ohjata moottorin toimintoja.
Clawbot on valmis ohjelmoitavaksi ohjaimen kanssa! Tämä tutkimus antaa sinulle työkalut joidenkin perusliikkeiden ohjelmointiin projektin sisällä.
VEXcode IQ, jota käytetään tässä tutkimuksessa:
-
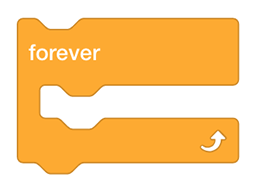
[Ikuisesti] -lohko – tämä lohko kiertää lohkosarjaa ikuisesti. [Ikuisesti]-silmukasta voi poistua vain käyttämällä katkolausetta tai pysäyttämällä ohjelman. [Ikuisesti]-lohko ei lopeta toistamista, ellei sen sisään aseteta katkolohkoa.
-
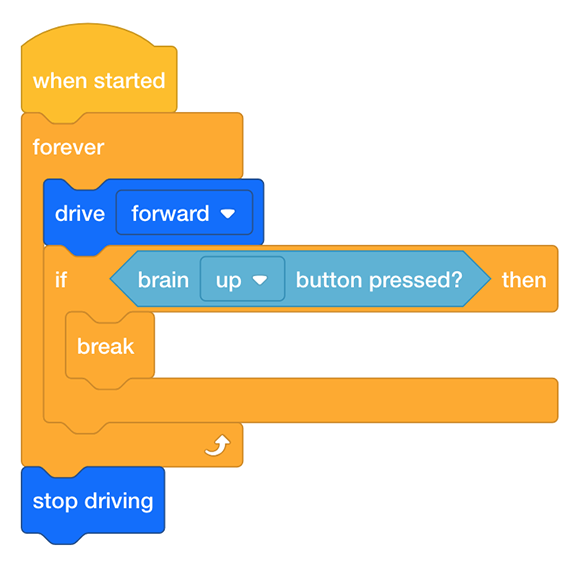
Tässä on esimerkki [Break]-lohkosta, jota käytetään poistumaan [Forever]-silmukasta.
-
-
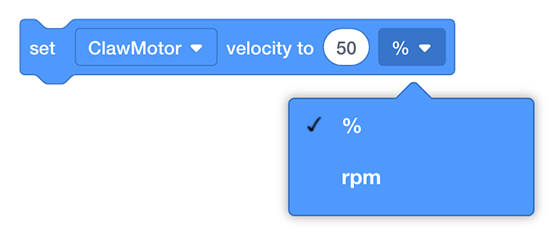
[Set motor velocity] -lohkot asettavat moottorin nopeuden.

-
Nopeudeksi voidaan asettaa joko prosentti tai rpm:
-
-
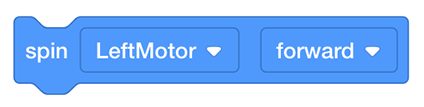
[Spin]-lohko pyörittää moottoria, kunnes se pysähtyy. Moottori pysäytetään pysäyttämällä ohjelma.
-
Lohko (ohjaimen sijainti) ilmoittaa ohjaimen ohjaussauvan sijainnin akselia pitkin. Joystick on 0, kun se on keskitetty akselille.
-
Tämän lohkon avulla ohjain voi määrittää moottorin nopeuden. Voit tehdä tämän vetämällä tämän lohkon Toolboxista [Set motor velocity] -lohkon nopeuden yli; tämä korvaa oletusnopeuden valitsemallasi ohjaimen asennolla.
-
Saat lisätietoja näistä lohkoista avaamalla Ohje ja valitsemalla lohko(t), joista sinulla on kysyttävää.
![]() Opettajan vinkkejä
Opettajan vinkkejä
- Jos tämä on ensimmäinen kerta, kun opiskelijat käyttävät VEXcode IQ:ta, he voivat viitata opetusohjelmiin milloin tahansa tämän tutkimuksen aikana. Oppaat sijaitsevat työkalupalkissa.

- Varmista, että jokaisella opiskelijaryhmällä on kaikki tarvittavat materiaalit.
![]() Opettajan työkalupakki
-
Opiskelijoiden tutkimusroolit
Opettajan työkalupakki
-
Opiskelijoiden tutkimusroolit
Saat apua opiskelijoiden järjestämiseen tähän aktiviteettiin napsauttamalla alla.
Jokaisen ryhmän rakentajan tulee hankkia tarvittava laitteisto. Tallentimen tulee hankkia ryhmän suunnittelumuistikirja. Ohjelmoijan tulee avata VEXcode IQ.
| Määrä | Tarvittavat materiaalit |
|---|---|
| 1 |
Clawbot |
| 1 |
Ladattu VEX IQ -robotin akku |
| 1 |
VEX IQ Radio |
| 1 |
Ohjain |
| 1 |
Kiinnityskaapeli |
| 1 |
VEXcode IQ |
| 1 |
USB-kaapeli (jos käytät tietokonetta) |
| 1 |
Tekninen muistikirja |