
কন্ট্রোলার এক্সপ্লোরেশন - পার্ট 1
![]() শিক্ষক টুলবক্স
-
কার্যকলাপের রূপরেখা
শিক্ষক টুলবক্স
-
কার্যকলাপের রূপরেখা
- এই অন্বেষণটি শিক্ষার্থীদের ক্লববট আচরণের সাথে পরিচয় করিয়ে দেবে যা একটি কন্ট্রোলারের সাথে কাজ করার জন্য প্রোগ্রাম করা যেতে পারে:
- [চিরকালের জন্য], [মোটর বেগ সেট করুন] এবং [স্পিন] ব্লকের পরিচয় দিন
- ক্লোবট প্রস্তুত কিনা তা দ্রুত সমস্যা সমাধানের পরীক্ষা করুন
- VEXcode IQ খুলুন
- পাঠের মধ্যে প্রদত্ত একটি সাধারণ প্রকল্প তৈরি করুন
- ডাউনলোড এবং রান প্রকল্প
- শিক্ষার্থীদের কন্ট্রোলার ব্যবহার করে অনুশীলন করতে দিন
- একটি আলোচনা সঙ্গে কার্যকলাপ মোড়ানো
- কন্ট্রোলার টেমপ্লেটের সাথে ক্লববট ব্যবহার করা শিক্ষার্থীদের কন্ট্রোলার ব্যবহার করে ক্লববট নিয়ন্ত্রণ করতে সক্ষম করে। VEXcode IQ-তে চারটি ভিন্ন ব্লক পাওয়া যায়, যেগুলো Clawbot-এর মোটর নিয়ন্ত্রণ করতে ব্যবহার করা যেতে পারে। Clawbot-এর প্রতিটি মোটরের বেগ নিয়ন্ত্রণ করতে ছাত্রদের [মোটর বেগ সেট], [স্পিন] এবং (কন্ট্রোলারের অবস্থান) ব্লকের প্যারামিটারগুলি সামঞ্জস্য করতে হবে এবং মোটর ফাংশন নিয়ন্ত্রণ করতে কন্ট্রোলারকে সক্ষম করতে হবে।
-
কন্ট্রোলার প্রোগ্রামিং সম্পর্কে আরও তথ্যের জন্য, নীচে ক্লিক করুন।
Google Doc / .docx / .pdf
- পুরো ক্লাসের কার্যকলাপ হিসাবে, শিক্ষার্থীদের সাথে প্রোগ্রামিং ব্লকগুলি পর্যালোচনা করুন। শিক্ষার্থীদের বলুন যে VEXcode IQ-তে চারটি ভিন্ন ব্লক পাওয়া যায়, যেগুলো Clawbot-এর মোটর নিয়ন্ত্রণ করতে ব্যবহার করা যেতে পারে। Clawbot-এর প্রতিটি মোটরের বেগ নিয়ন্ত্রণ করতে ছাত্রদের [মোটর বেগ সেট], [স্পিন] এবং (কন্ট্রোলারের অবস্থান) ব্লকের প্যারামিটারগুলি সামঞ্জস্য করতে হবে এবং মোটর ফাংশন নিয়ন্ত্রণ করতে কন্ট্রোলারকে সক্ষম করতে হবে।
Clawbot কন্ট্রোলার সঙ্গে প্রোগ্রামিং জন্য প্রস্তুত! এই অন্বেষণ আপনাকে একটি প্রকল্পের মধ্যে কিছু মৌলিক আন্দোলন প্রোগ্রাম করতে সক্ষম হতে টুল দেবে।
VEXcode IQ যা এই অনুসন্ধানে ব্যবহার করা হবে:
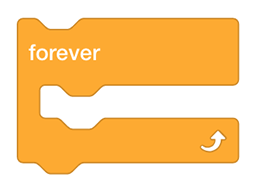
- [ফরএভার] ব্লক—এই ব্লকটি চিরতরে ব্লকের একটি সেট লুপ করে। একটি [ফরএভার] লুপ শুধুমাত্র একটি বিরতি ব্লক ব্যবহার করে বা প্রোগ্রাম বন্ধ করে প্রস্থান করা যেতে পারে। [চিরকাল] ব্লকটি পুনরাবৃত্তি করা বন্ধ করবে না যদি না এটির ভিতরে একটি বিরতি ব্লক স্থাপন করা হয়।
- এখানে একটি [ব্রেক] ব্লকের একটি উদাহরণ রয়েছে যা একটি [ফরএভার] লুপ থেকে প্রস্থান করতে ব্যবহৃত হচ্ছে।
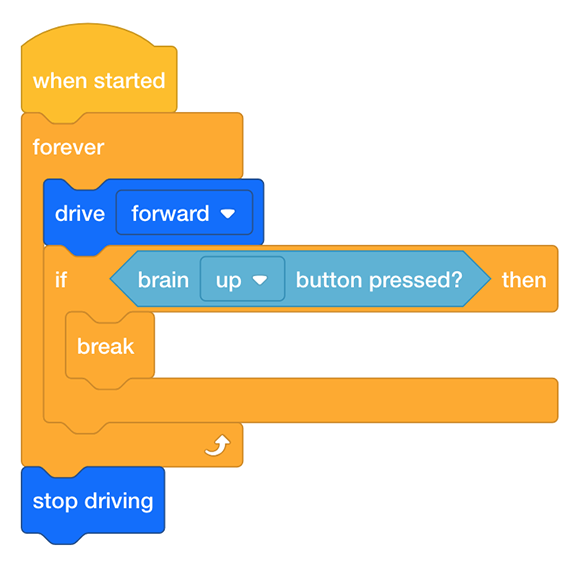
- এখানে একটি [ব্রেক] ব্লকের একটি উদাহরণ রয়েছে যা একটি [ফরএভার] লুপ থেকে প্রস্থান করতে ব্যবহৃত হচ্ছে।
- [সেট মোটর বেগ] ব্লক মোটরের গতি নির্ধারণ করে।

- বেগ শতাংশ বা rpm এ সেট করা যেতে পারে:
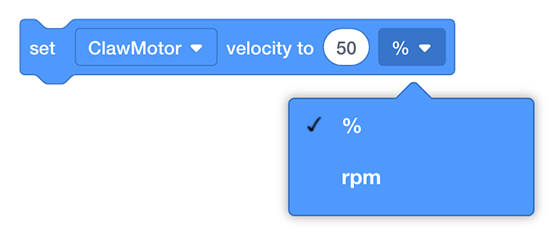
- বেগ শতাংশ বা rpm এ সেট করা যেতে পারে:
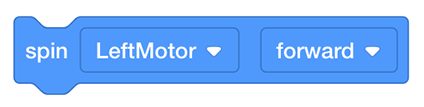
- [স্পিন] ব্লকটি থামানো পর্যন্ত একটি মোটর ঘোরে। কর্মসূচি বন্ধ করে মোটর বন্ধ হয়ে যেত।
- (নিয়ন্ত্রকের অবস্থান) ব্লকটি একটি অক্ষ বরাবর কন্ট্রোলারে জয়স্টিকের অবস্থান রিপোর্ট করে। অক্ষকে কেন্দ্র করে জয়স্টিক 0 হয়।
- এই ব্লকটি কন্ট্রোলারকে একটি মোটরের বেগ নির্ধারণ করতে সক্ষম করবে। এটি করার জন্য, এই ব্লকটিকে টুলবক্স থেকে [সেট মোটর বেগ] ব্লকের বেগের উপরে টেনে আনুন; এটি আপনার পছন্দের কন্ট্রোলার অবস্থানের সাথে ডিফল্ট বেগ প্রতিস্থাপন করবে।
এই ব্লকগুলির যে কোনও একটি সম্পর্কে আরও তথ্য জানতে, সহায়তা খুলুন এবং যে ব্লকগুলি সম্পর্কে আপনার প্রশ্ন আছে সেটি নির্বাচন করুন।
![]() শিক্ষক টিপস
শিক্ষক টিপস
- যদি এই ছাত্রদের প্রথমবার VEXcode IQ ব্যবহার করা হয়, তাহলে তারা এই অন্বেষণের সময় যে কোনো সময় টিউটোরিয়ালগুলি উল্লেখ করতে পারে। টিউটোরিয়ালগুলি টুলবারে অবস্থিত।

- নিশ্চিত করুন যে প্রতিটি ছাত্র গোষ্ঠীর সমস্ত প্রয়োজনীয় উপকরণ রয়েছে।
![]() শিক্ষক টুলবক্স
-
ছাত্রদের অন্বেষণ ভূমিকা
শিক্ষক টুলবক্স
-
ছাত্রদের অন্বেষণ ভূমিকা
এই কার্যকলাপের জন্য ছাত্রদের সংগঠিত করতে সাহায্যের জন্য নীচে ক্লিক করুন.
Google Doc / .docx / .pdf
প্রতিটি গ্রুপের নির্মাতাকে প্রয়োজনীয় হার্ডওয়্যার পেতে হবে। রেকর্ডারকে গ্রুপের ইঞ্জিনিয়ারিং নোটবুক পেতে হবে। প্রোগ্রামারকে VEXcode IQ খুলতে হবে।
| পরিমাণ | উপকরণ প্রয়োজন |
|---|---|
| 1 |
ক্লবট |
| 1 |
চার্জড VEX IQ রোবট ব্যাটারি |
| 1 |
VEX IQ রেডিও |
| 1 |
নিয়ন্ত্রক |
| 1 |
টিথার ক্যাবল |
| 1 |
VEXcode IQ |
| 1 |
USB কেবল (যদি একটি কম্পিউটার ব্যবহার করেন) |
| 1 |
ইঞ্জিনিয়ারিং নোটবুক |