
Controllerverkenning - Deel 1
![]() Teacher Toolbox
-
Activiteitenoverzicht
Teacher Toolbox
-
Activiteitenoverzicht
- Deze verkenning zal studenten kennis laten maken met Clawbot-gedrag dat kan worden geprogrammeerd om met een controller te werken:
- Introduceer de blokken [Forever], [Set motor velocity] en [Spin]
- Voer een snelle probleemoplossing uit om te controleren of de Clawbot klaar is
- Open VEXcode IQ
- Bouw een eenvoudig project dat binnen de les wordt aangeboden
- Download en voer het project uit
- Laat de leerlingen oefenen met de Controller
- Sluit de activiteit af met een discussie
- Het gebruik van de Clawbot met Controller-sjabloon stelt de studenten in staat om de Clawbot te bedienen met behulp van de Controller. Er zijn vier verschillende blokken beschikbaar in VEXcode IQ, die kunnen worden gebruikt om de motoren van de Clawbot aan te sturen. Studenten moeten de parameters in de blokken [Set motor velocity] (Motorsnelheid instellen), [Spin] (Draaien) en (positie van de regelaar) aanpassen om de snelheid voor elk van de motoren van de Clawbot te regelen en de regelaar in staat te stellen de motorfuncties te bedienen.
-
Klik hieronder voor meer informatie over het programmeren van de Controller.
Google Doc / .docx / .pdf
- Bekijk als hele klasactiviteit de programmeerblokken met de leerlingen. Vertel de leerlingen dat er vier verschillende blokken beschikbaar zijn in VEXcode IQ, die kunnen worden gebruikt om de motoren van de Clawbot aan te sturen. Studenten moeten de parameters in de blokken [Set motor velocity] (Motorsnelheid instellen), [Spin] (Draaien) en (positie van de regelaar) aanpassen om de snelheid voor elk van de motoren van de Clawbot te regelen en de regelaar in staat te stellen de motorfuncties te bedienen.
Clawbot is klaar om te programmeren met de Controller! Deze verkenning geeft je de tools om enkele basisbewegingen binnen een project te kunnen programmeren.
VEXcode IQ die in deze verkenning zal worden gebruikt:
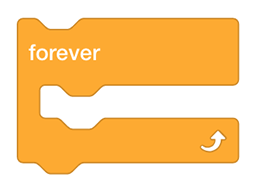
- Het [Forever] blok - dit blok maakt voor altijd een reeks blokken. Een [Forever] -lus kan alleen worden verlaten door een pauzeblok te gebruiken of door het programma te stoppen. Het [Forever] blok stopt niet met herhalen tenzij er een breukblok in wordt geplaatst.
- Hier is een voorbeeld van een [Break] -blok dat wordt gebruikt om een [Forever] -lus af te sluiten.
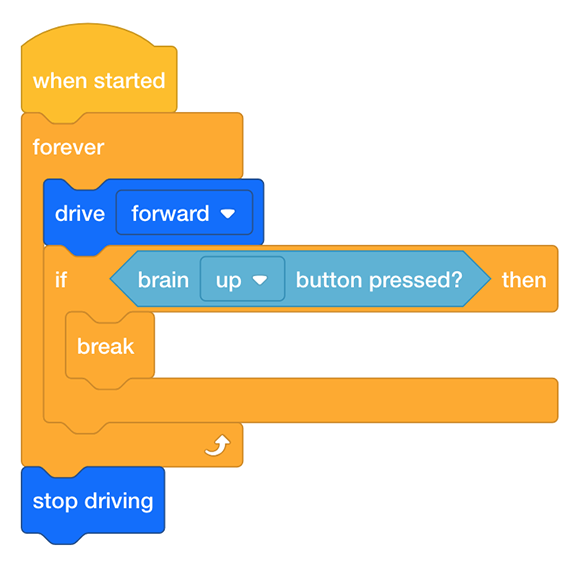
- Hier is een voorbeeld van een [Break] -blok dat wordt gebruikt om een [Forever] -lus af te sluiten.
- De blokken [Set motor velocity] stellen de snelheid van de motor in.

- De snelheid kan worden ingesteld op procent of op tpm:
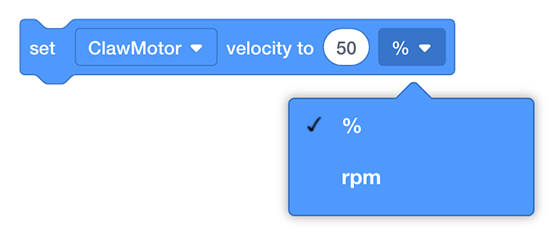
- De snelheid kan worden ingesteld op procent of op tpm:
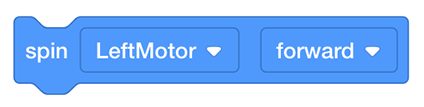
- Het [Spin] blok draait een motor totdat deze stopt. De motor zou worden gestopt door het programma te stoppen.
- Het (positie van controller) blok rapporteert de positie van de joystick op de controller langs een as. De joystick wordt 0 wanneer gecentreerd op de as.
- Met dit blok kan de controller de snelheid van een motor bepalen. Om dit te doen, sleept u dit blok uit de Toolbox over de snelheid in het blok [Set motor velocity]; dit zal de standaardsnelheid vervangen door de positie van de Controller van uw keuze.
Om meer informatie over een van deze blokken te vinden, open je Help en selecteer je de blok(ken) waarover je vragen hebt.
![]() Tips voor docenten
Tips voor docenten
- Als dit de eerste keer is dat de leerlingen VEXcode IQ gebruiken, kunnen ze de tutorials op elk gewenst moment tijdens deze verkenning raadplegen. De tutorials bevinden zich in de werkbalk.

- Zorg ervoor dat elke studentengroep over alle benodigde materialen beschikt.
![]() Docententoolbox
-
Verkenningsrollen van studenten
Docententoolbox
-
Verkenningsrollen van studenten
Klik hieronder voor hulp bij het organiseren van studenten voor deze activiteit.
Google Doc / .docx / .pdf
De Builder in elke groep moet de benodigde hardware krijgen. De recorder moet het technische notitieboek van de groep krijgen. De programmeur moet VEXcode IQ openen.
| Aantal | Benodigde materialen |
|---|---|
| 1 |
Clawbot |
| 1 |
Opgeladen VEX IQ-robotbatterij |
| 1 |
VEX IQ Radio |
| 1 |
Controller |
| 1 |
Tetherkabel |
| 1 |
VEXcode IQ |
| 1 |
USB-kabel (bij gebruik van een computer) |
| 1 |
Technisch notitieboekje |