
Controller-Erkundung - Teil 1
![]() Lehrer-Toolbox
-
Aktivitätsübersicht
Lehrer-Toolbox
-
Aktivitätsübersicht
- Diese Erkundung führt die Schüler in Clawbot-Verhaltensweisen ein, die programmiert werden können, um mit einem Controller zu arbeiten:
- Führen Sie die Blöcke [Forever], [Set motor velocity] und [Spin] ein
- Führen Sie eine schnelle Fehlerbehebung durch, um zu überprüfen, ob der Clawbot bereit ist
- VEXcode IQ öffnen
- Erstellen Sie ein einfaches Projekt, das in der Lektion bereitgestellt wird
- Laden Sie das Projekt herunter und führen Sie es aus
- Lassen Sie die Schüler die Verwendung des Controllers üben
- Schließen Sie die Aktivität mit einer Diskussion ab
- Die Verwendung der Clawbot mit Controller-Vorlage ermöglicht es den Schülern, den Clawbot mit dem Controller zu steuern. In VEXcode IQ stehen vier verschiedene Blöcke zur Verfügung, mit denen die Motoren des Clawbots gesteuert werden können. Die Schüler müssen die Parameter in den Blöcken [Motorgeschwindigkeit einstellen], [Spin] und (Position der Steuerung) anpassen, um die Geschwindigkeit für jeden Motor des Clawbots zu steuern und die Steuerung in die Lage zu versetzen, die Motorfunktionen zu steuern.
-
Für weitere Informationen über die Programmierung des Controllers klicken Sie unten.
Google Doc / .docx / .pdf
- Besprechen Sie als Ganzes die Programmierblöcke mit den Schülern. Sagen Sie den Schülern, dass in VEXcode IQ vier verschiedene Blöcke verfügbar sind, mit denen die Motoren des Clawbots gesteuert werden können. Die Schüler müssen die Parameter in den Blöcken [Motorgeschwindigkeit einstellen], [Spin] und (Position der Steuerung) anpassen, um die Geschwindigkeit für jeden Motor des Clawbots zu steuern und die Steuerung in die Lage zu versetzen, die Motorfunktionen zu steuern.
Clawbot ist bereit für die Programmierung mit dem Controller! Diese Erkundung gibt Ihnen die Werkzeuge an die Hand, um einige grundlegende Bewegungen innerhalb eines Projekts programmieren zu können.
VEXcode IQ, der in dieser Untersuchung verwendet wird:
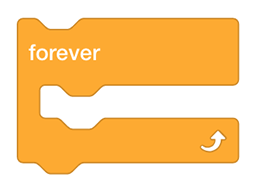
- Der [Forever] -Block - Dieser Block durchläuft eine Reihe von Blöcken für immer. Eine [Forever] -Schleife kann nur durch Verwendung einer Unterbrechungssperre oder durch Stoppen des Programms verlassen werden. Der [Forever] -Block hört nicht auf, sich zu wiederholen, es sei denn, ein Unterbrechungsblock wird darin platziert.
- Hier ist ein Beispiel für einen [Break] -Block, der verwendet wird, um eine [Forever] -Schleife zu verlassen.
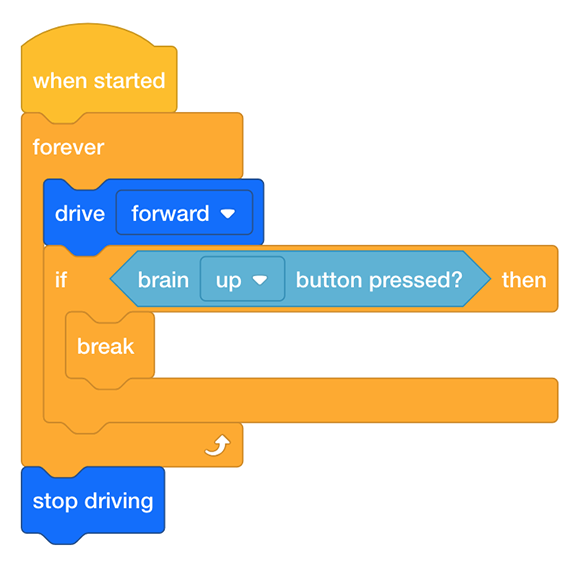
- Hier ist ein Beispiel für einen [Break] -Block, der verwendet wird, um eine [Forever] -Schleife zu verlassen.
- Die Blöcke [Motorgeschwindigkeit einstellen] stellen die Drehzahl des Motors ein.

- Die Geschwindigkeit kann entweder auf Prozent oder auf U/min eingestellt werden:
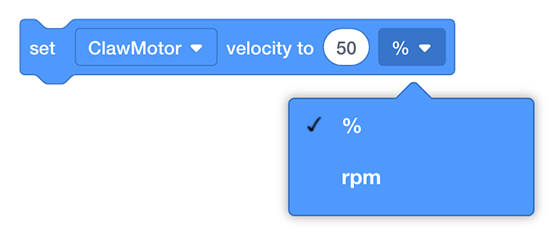
- Die Geschwindigkeit kann entweder auf Prozent oder auf U/min eingestellt werden:
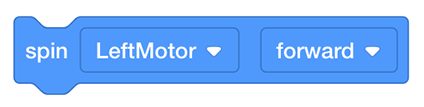
- Der [Spin] -Block dreht einen Motor, bis er angehalten wird. Der Motor würde durch Stoppen des Programms gestoppt.
- Der Block (Position der Steuerung) meldet die Position des Joysticks auf der Steuerung entlang einer Achse. Der Joystick ist 0, wenn er auf der Achse zentriert ist.
- Dieser Block ermöglicht es dem Controller, die Geschwindigkeit eines Motors zu bestimmen. Ziehen Sie dazu diesen Block aus der Toolbox über die Geschwindigkeit im Block [Motorgeschwindigkeit einstellen]. Dadurch wird die Standardgeschwindigkeit durch die Controller-Position Ihrer Wahl ersetzt.
Um weitere Informationen zu diesen Blöcken zu erhalten, öffne die Hilfe und wähle den/die Block(e) aus, zu dem/denen du Fragen hast.
![]() Lehrertipps
Lehrertipps
- Wenn dies das erste Mal ist, dass die Schüler VEXcode IQ verwenden, können sie während dieser Erkundung jederzeit auf die Tutorials verweisen. Die Tutorials befinden sich in der Symbolleiste.

- Stellen Sie sicher, dass jede Schülergruppe über alle notwendigen Materialien verfügt.
![]() Lehrer-Toolbox
- Schüler-Erkundungsrollen
Lehrer-Toolbox
- Schüler-Erkundungsrollen
Um Hilfe bei der Organisation der Schüler für diese Aktivität zu erhalten, klicken Sie unten.
Google Doc / .docx / .pdf
Der Builder in jeder Gruppe sollte die erforderliche Hardware erhalten. Der Recorder sollte das technische Notizbuch der Gruppe erhalten. Der Programmierer sollte VEXcode IQ öffnen.
| Menge | Benötigtes Material |
|---|---|
| 1 |
Clawbot |
| 1 |
Geladener VEX IQ Roboter-Akku |
| 1 |
VEX IQ Radio |
| 1 |
Controller |
| 1 |
Halteseil |
| 1 |
VEXcode IQ |
| 1 |
USB-Kabel (bei Verwendung eines Computers) |
| 1 |
Technisches Notizbuch |