
Exploração do Controlador - Parte 1
![]() Caixa de ferramentas do professor
-
Esquema da atividade
Caixa de ferramentas do professor
-
Esquema da atividade
- Esta exploração apresentará aos alunos os comportamentos do Clawbot que podem ser programados para operar com um Controlador:
- Apresente os blocos [Forever], [Set motor speed] e [Spin]
- Faça uma rápida resolução de problemas para verificar se o Clawbot está pronto
- Abra o VEXcode IQ
- Crie um projeto simples fornecido na lição
- Descarregue e execute o projeto
- Peça aos alunos que pratiquem a utilização do Controlador
- Encerre a atividade com uma discussão
- A utilização do modelo Clawbot com Controlador permite que os alunos controlem o Clawbot utilizando o Controlador. Existem quatro blocos diferentes disponíveis no VEXcode IQ, que podem ser utilizados para controlar os motores do Clawbot. Os alunos terão de ajustar os parâmetros nos blocos [Definir velocidade do motor], [Rotação] e (posição do controlador) para controlar a velocidade de cada um dos motores do Clawbot e permitir que o controlador controle as funções do motor.
-
Para mais informações sobre a programação do Controlador, clique em abaixo.
- Como atividade de toda a turma, reveja os blocos de programação com os alunos. Diga aos alunos que existem quatro blocos diferentes disponíveis no VEXcode IQ, que podem ser utilizados para controlar os motores do Clawbot. Os alunos terão de ajustar os parâmetros nos blocos [Definir velocidade do motor], [Rotação] e (posição do controlador) para controlar a velocidade de cada um dos motores do Clawbot e permitir que o controlador controle as funções do motor.
O Clawbot está pronto para a programação com o Controlador! Esta exploração dar-lhe-á as ferramentas para poder programar alguns movimentos básicos dentro de um projeto.
VEXcode IQ que será utilizado nesta exploração:
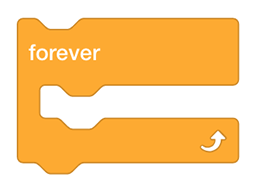
- O bloco [Para sempre] – este bloco faz um loop num conjunto de blocos para sempre. Um ciclo [Forever] só pode ser terminado utilizando um bloco de interrupção ou parando o programa. O bloco [Para sempre] não irá parar de se repetir a não ser que um bloco de interrupção seja colocado no seu interior.
- Eis um exemplo de um bloco [Break] a ser utilizado para sair de um ciclo [Forever].
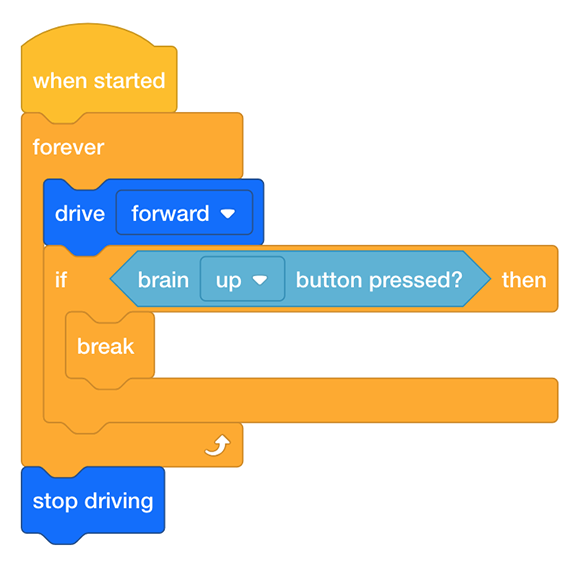
- Eis um exemplo de um bloco [Break] a ser utilizado para sair de um ciclo [Forever].
- Os blocos [Definir velocidade do motor] definem a velocidade do motor.

- A velocidade pode ser definida como percentagem ou rpm:
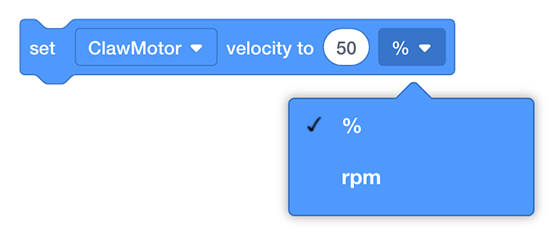
- A velocidade pode ser definida como percentagem ou rpm:
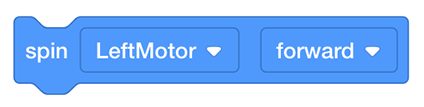
- O bloco [Spin] faz rodar um motor até parar. O motor seria parado ao parar o programa.
- O bloco (posição do comando) informa a posição do Joystick no Comando ao longo de um eixo. O Joystick é 0 quando centrado no eixo.
- Este bloco permitirá ao Controlador determinar a velocidade de um motor. Para isso arraste este bloco do Toolbox sobre a velocidade do bloco [Set motor speed]; isto substituirá a velocidade padrão pela posição do controlador da sua escolha.
Para obter mais informações sobre qualquer um destes blocos, abra a Ajuda e seleccione o(s) bloco(s) sobre o(s) qual(is) tem dúvidas.
![]() Dicas para professores
Dicas para professores
- Se esta for a primeira vez que os alunos utilizam o VEXcode IQ, poderão consultar os Tutoriais em qualquer momento durante esta exploração. Os Tutoriais estão localizados na Barra de Ferramentas.

- Certifique-se de que cada grupo de alunos tem todos os materiais necessários.
![]() Caixa de ferramentas do professor
-
Funções de exploração dos alunos
Caixa de ferramentas do professor
-
Funções de exploração dos alunos
Para obter ajuda na organização dos alunos para esta atividade, clique abaixo.
O Construtor de cada grupo deverá obter o hardware necessário. O Registador deverá receber o caderno de engenharia do grupo. O programador deve abrir o VEXcode IQ.
| Quantidade | Materiais necessários |
|---|---|
| 1 |
Garrabot |
| 1 |
Bateria carregada do robô VEX IQ |
| 1 |
Rádio VEX IQ |
| 1 |
Controlador |
| 1 |
Cabo de amarração |
| 1 |
VEXcódigo IQ |
| 1 |
Cabo USB (se utilizar um computador) |
| 1 |
Caderno de Engenharia |