
![]() 教師ツールボックス
-
アクティビティ概要
教師ツールボックス
-
アクティビティ概要
-
この探索では、コントローラーで動作するようにプログラムできる Clawbot の動作を生徒に紹介します。
-
Clawbot with Controller テンプレートを使用すると、学生はコントローラーを使用して Clawbot を制御できるようになります。 VEXcode IQ には 4 つの異なるブロックがあり、Clawbot のモーターの制御に使用できます。 学生は、[モーター速度の設定]、[スピン]、および (コントローラーの位置) ブロックのパラメーターを調整して、Clawbot の各モーターの速度を制御し、コントローラーがモーター機能を制御できるようにする必要があります。
-
コントローラーのプログラミングの詳細については、以下の クリックしてください。
-
クラス全体のアクティビティとして、生徒と一緒にプログラミング ブロックを確認します。 VEXcode IQ には 4 つの異なるブロックがあり、Clawbot のモーターの制御に使用できることを生徒に伝えます。 学生は、[モーター速度の設定]、[スピン]、および (コントローラーの位置) ブロックのパラメーターを調整して、Clawbot の各モーターの速度を制御し、コントローラーがモーター機能を制御できるようにする必要があります。
Clawbot は、コントローラーを使用してプログラミングする準備ができています。 この探索により、プロジェクト内のいくつかの基本的な動きをプログラムできるツールが得られます。
この調査で使用される VEXcode IQ:
-
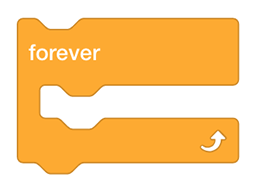
[Forever] ブロック - このブロックは、一連のブロックを永久にループします。 [Forever] ループは、ブレーク ブロックを使用するか、プログラムを停止することによってのみ終了できます。 [Forever]ブロックは、その中にブレークブロックを置かない限り繰り返しが止まりません。
-
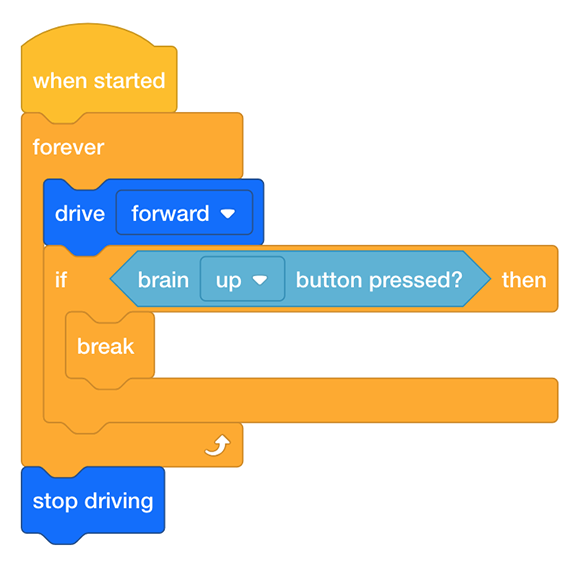
以下は、[Forever] ループを終了するために [Break] ブロックが使用されている例です。
-
-
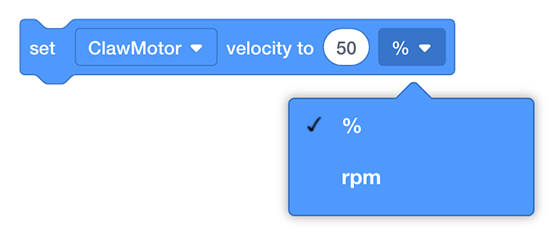
[モーター速度の設定]ブロックはモーターの速度を設定します

-
速度はパーセントまたはrpmに設定できます:
-
-
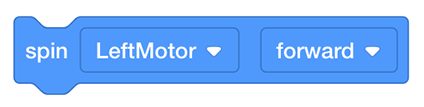
[Spin]ブロックはモーターを停止するまで回転させます。 プログラムを停止するとモーターが停止します
-
(コントローラの位置) ブロックは、軸に沿ったコントローラ上のジョイスティックの位置を報告します。 ジョイスティックは軸の中央に配置されると になります。0
-
このブロックにより、コントローラーはモーターの速度を決定できるようになります。 これを行うには、このブロックをツールボックスから [モーター速度の設定] ブロックの速度の上にドラッグします。これにより、デフォルトの速度が、選択したコントローラーの位置に置き換えられます。
-
これらのブロックの詳細については、ヘルプを開き、質問があるブロックを選択してください。
![]() 教師のヒント
教師のヒント
- 学生が VEXcode IQ を初めて使用する場合は、学習中にいつでもチュートリアルを参照できます。 チュートリアルはツールバーにあります

- 各学生グループに必要な資料がすべて揃っていることを確認してください
![]() 教師ツールボックス
-
生徒の探究の役割
教師ツールボックス
-
生徒の探究の役割
このアクティビティへの生徒の手配については、以下をクリックしてください。
各グループのビルダーは、必要なハードウェアを入手する必要があります。 記録者はグループのエンジニアリング ノートを取得する必要があります。 プログラマは VEXcode IQ を開く必要があります。
| 量 | 必要な材料 |
|---|---|
| 1 |
クローボット |
| 1 |
充電済みの VEX IQ ロボット バッテリー |
| 1 |
VEX IQ ラジオ |
| 1 |
コントローラ |
| 1 |
テザーケーブル |
| 1 |
VEXコードIQ |
| 1 |
USB ケーブル (コンピューターを使用する場合) |
| 1 |
エンジニアリングノート |