
![]() 教师工具箱
-
活动大纲
教师工具箱
-
活动大纲
-
这次探索将向学生介绍 Clawbot 的行为,这些行为可以通过编程来与控制器一起操作:
-
使用带有控制器模板的 Clawbot 使学生能够使用控制器控制 Clawbot。 VEXcode IQ 中有四种不同的模块,可用于控制 Clawbot 的电机。 学生需要调整[设置电机速度]、[旋转]和(控制器位置)块中的参数,以控制每个 Clawbot 电机的速度并使控制器能够控制电机功能。
-
有关控制器编程的更多信息,请单击下面的 。
-
作为整个课堂活动,与学生一起复习编程模块。 告诉学生 VEXcode IQ 中有四种不同的模块,可用于控制 Clawbot 的电机。 学生需要调整[设置电机速度]、[旋转]和(控制器位置)块中的参数,以控制每个 Clawbot 电机的速度并使控制器能够控制电机功能。
Clawbot 已准备好使用控制器进行编程! 这种探索将为您提供能够在项目中对一些基本动作进行编程的工具。
本次探索中将使用的 VEXcode IQ:
-
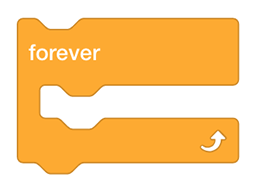
[永远] 块——此块永远循环一组块。 只有使用中断块或停止程序才能退出 [永久] 循环。 [Forever] 块不会停止重复,除非在其内部放置了中断块。
-
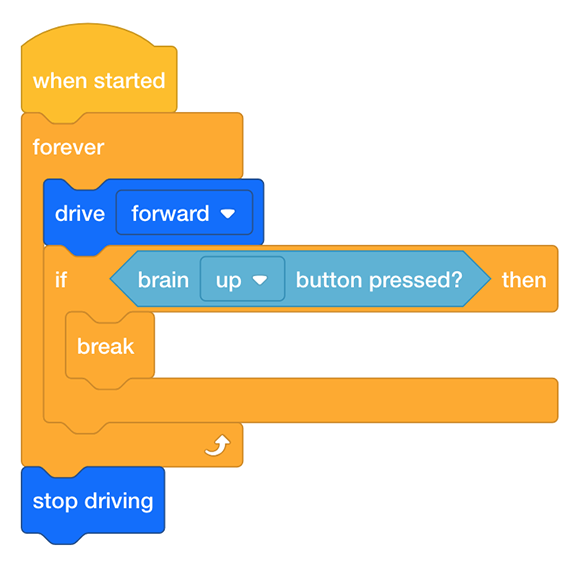
以下是使用 [Break] 块退出 [Forever] 循环的示例。
-
-
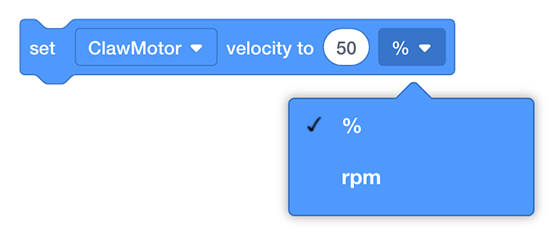
[设置电机速度] 块设置电机的速度

-
速度可以设置为百分比或 rpm:
-
-
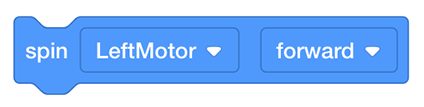
[Spin] 块使电机旋转直至停止。 停止程序即可停止电机
-
(控制器位置)块报告控制器上操纵杆沿轴的位置。 操纵杆在轴上居中时为
-
该块将使控制器能够确定电机的速度。0 为此,将此块从工具箱拖到[设置 速度]块中的速度上;这将用您选择的控制器位置替换默认速度。
-
要了解有关这些块的更多信息,请打开“帮助”,然后选择您有疑问的块。
![]() 教师提示
教师提示
- 如果这是学生第一次使用 VEXcode IQ,他们可以在探索过程中随时参考教程。 教程位于工具栏中

- 确保每个学生小组都有所有必要的材料
![]() 教师工具箱
-
学生的探索角色
教师工具箱
-
学生的探索角色
如需帮助组织学生参加此活动,请点击下面。
每个组中的建造者应该获得所需的硬件。 记录员应该拿到小组的工程笔记本。 程序员应该打开 VEXcode IQ。
| 数量 | 所需材料 |
|---|---|
| 1 |
爪机器人 |
| 1 |
已充电的 VEX IQ 机器人电池 |
| 1 |
VEX IQ 收音机 |
| 1 |
控制器 |
| 1 |
系绳电缆 |
| 1 |
VEXcode IQ |
| 1 |
USB 电缆(如果使用计算机) |
| 1 |
工程笔记本 |