
![]() Mokytojo įrankių rinkinys
Veiklos
Mokytojo įrankių rinkinys
Veiklos
-
Šis tyrimas supažindins studentus su „Clawbot“ elgesiu, kurį galima užprogramuoti veikti su valdikliu:
-
Pristatykite [Forever], [Set motor speed] ir [Spin] blokus
-
Greitai pašalinkite triktis ir patikrinkite, ar „Clawbot“ yra paruoštas
-
Atidarykite VEXcode IQ
-
Sukurkite paprastą projektą, pateiktą pamokoje
-
Atsisiųskite ir paleiskite projektą
-
Leiskite mokiniams pasitreniruoti naudojant valdiklį
-
Užbaikite veiklą diskusija
-
-
Naudojant Clawbot su valdikliu šabloną, mokiniai gali valdyti Clawbot naudodami valdiklį. „VEXcode IQ“ yra keturi skirtingi blokai, kurie gali būti naudojami valdyti „Clawbot“ variklius. Mokiniai turės pakoreguoti parametrus [Set motor speed], [Spin] ir (valdiklio padėtis) blokuose, kad valdytų kiekvieno Clawbot variklio greitį ir įgalintų Valdiklį valdyti variklio funkcijas.
-
Norėdami gauti daugiau informacijos apie valdiklio programavimą, spustelėkite žemiau.
-
Vykdydami visos klasės veiklą kartu su mokiniais peržiūrėkite programavimo blokus. Pasakykite mokiniams, kad VEXcode IQ yra keturi skirtingi blokai, kurie gali būti naudojami valdyti Clawbot variklius. Mokiniai turės pakoreguoti parametrus [Set motor speed], [Spin] ir (valdiklio padėtis) blokuose, kad valdytų kiekvieno Clawbot variklio greitį ir įgalintų Valdiklį valdyti variklio funkcijas.
Clawbot paruoštas programavimui su valdikliu! Šis tyrimas suteiks jums įrankius, kad galėtumėte programuoti kai kuriuos pagrindinius projekto judesius.
VEXcode IQ, kuris bus naudojamas šiame tyrime:
-
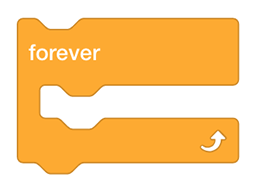
[amžinai] blokas – šis blokas visam laikui sujungia blokų rinkinį. Iš [Forever] kilpos galima išeiti tik naudojant pertraukos bloką arba sustabdžius programą. Blokas [Amžinai] nenustos kartotis, nebent jo viduje bus įdėtas pertraukos blokas.
-
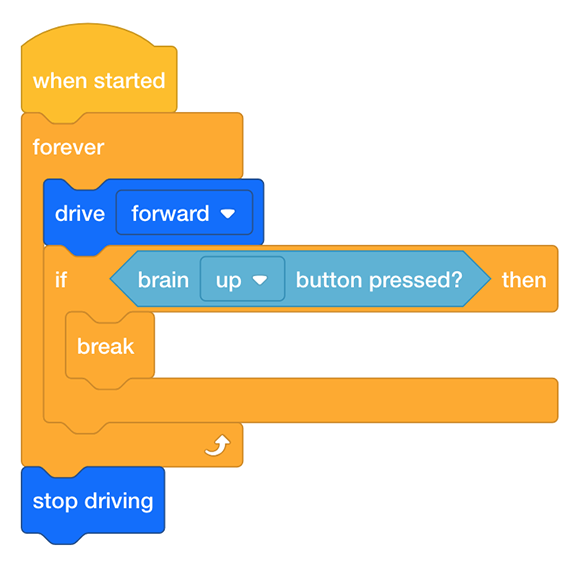
Štai pavyzdys, kai blokas [Break] naudojamas išeiti iš [Forever] ciklo.
-
-
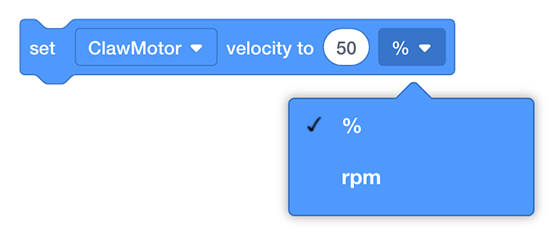
Blokuose [Nustatyti variklio greitį] nustatomas variklio greitis.

-
Greitis gali būti nustatytas procentais arba sūkiais per minutę:
-
-
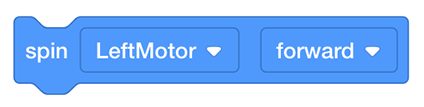
[Spin] blokas suka variklį, kol sustoja. Variklis būtų sustabdytas sustabdžius programą.
-
Blokas (valdiklio padėtis) nurodo valdiklio vairasvirtės padėtį pagal ašį. Vairasvirtė yra 0, kai jos centras yra ašyje.
-
Šis blokas leis valdikliui nustatyti variklio greitį. Norėdami tai padaryti, vilkite šį bloką iš įrankių dėžės virš greičio bloke [Set motor velocity]; tai pakeis numatytąjį greitį į jūsų pasirinktą valdiklio padėtį.
-
Norėdami sužinoti daugiau informacijos apie bet kurį iš šių blokų, atidarykite Žinyną ir pasirinkite bloką (-us), dėl kurio (-ių) turite klausimų.
![]() Mokytojo patarimai
Mokytojo patarimai
- Jei mokiniai pirmą kartą naudoja VEXcode IQ, bet kuriuo šio tyrinėjimo metu jie gali peržiūrėti vadovėlius. Mokymai yra įrankių juostoje.

- Įsitikinkite, kad kiekviena mokinių grupė turi visą reikalingą medžiagą.
![]() Mokytojo įrankių rinkinys
tyrinėjimo vaidmenys
Mokytojo įrankių rinkinys
tyrinėjimo vaidmenys
Jei reikia pagalbos organizuojant studentus šiai veiklai, spustelėkite toliau.
Kiekvienos grupės statybininkas turėtų gauti reikiamą techninę įrangą. Įrašytojas turėtų gauti grupės inžinerinį sąsiuvinį. Programuotojas turėtų atidaryti VEXcode IQ.
| Kiekis | Reikalingos medžiagos |
|---|---|
| 1 |
Clawbot |
| 1 |
Įkrauta VEX IQ roboto baterija |
| 1 |
VEX IQ radijas |
| 1 |
Valdiklis |
| 1 |
Pririšimo kabelis |
| 1 |
VEXcode IQ |
| 1 |
USB kabelis (jei naudojate kompiuterį) |
| 1 |
Inžinerijos sąsiuvinis |