
Khám phá bộ điều khiển - Phần 1
![]() Hộp công cụ dành cho giáo viên
- Đề cương
hoạt động
Hộp công cụ dành cho giáo viên
- Đề cương
hoạt động
- Cuộc khám phá này sẽ giới thiệu cho học sinh các hành vi Clawbot có thể được lập trình để hoạt động với Bộ điều khiển:
- Giới thiệu các khối [Mãi mãi], [Đặt vận tốc động cơ] và [Quay]
- Thực hiện khắc phục sự cố nhanh chóng để kiểm tra xem Clawbot đã sẵn sàng chưa
- Mở VEXcode IQ
- Xây dựng một dự án đơn giản được cung cấp trong bài học
- Tải xuống và chạy dự án
- Yêu cầu học sinh thực hành sử dụng Bộ điều khiển
- Kết thúc hoạt động bằng một cuộc thảo luận
- Sử dụng mẫu Clawbot với Bộ điều khiển cho phép sinh viên điều khiển Clawbot bằng Bộ điều khiển. Có bốn khối khác nhau có sẵn trong VEXcode IQ, có thể được sử dụng để điều khiển động cơ của Clawbot. Học sinh sẽ cần điều chỉnh các thông số trong các khối [Đặt vận tốc động cơ], [Quay] và (vị trí của bộ điều khiển) để điều khiển vận tốc cho từng động cơ của Clawbot và cho phép Bộ điều khiển điều khiển các chức năng của động cơ.
-
Để biết thêm thông tin về lập trình Bộ điều khiển, hãy nhấp vào bên dưới.
Google Doc / .docx / .pdf
- Trong toàn bộ hoạt động của lớp, hãy ôn lại các khối lập trình với học viên. Nói với học sinh rằng có bốn khối khác nhau có sẵn trong VEXcode IQ, có thể được sử dụng để điều khiển động cơ của Clawbot. Học sinh sẽ cần điều chỉnh các thông số trong các khối [Đặt vận tốc động cơ], [Quay] và (vị trí của bộ điều khiển) để điều khiển vận tốc cho từng động cơ của Clawbot và cho phép Bộ điều khiển điều khiển các chức năng của động cơ.
Clawbot đã sẵn sàng để lập trình với Bộ điều khiển! Cuộc thăm dò này sẽ cung cấp cho bạn các công cụ để có thể lập trình một số chuyển động cơ bản trong một dự án.
VEXcode IQ sẽ được sử dụng trong khám phá này:
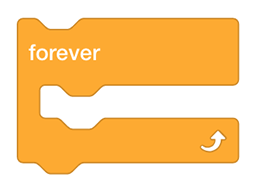
- Khối [Mãi mãi] - khối này lặp lại một tập hợp các khối mãi mãi. Chỉ có thể thoát vòng lặp [Forever] bằng cách sử dụng khối ngắt hoặc bằng cách dừng chương trình. Khối [Mãi mãi] sẽ không ngừng lặp lại trừ khi một khối ngắt được đặt bên trong nó.
- Dưới đây là ví dụ về khối [Break] được sử dụng để thoát khỏi vòng lặp [Forever].
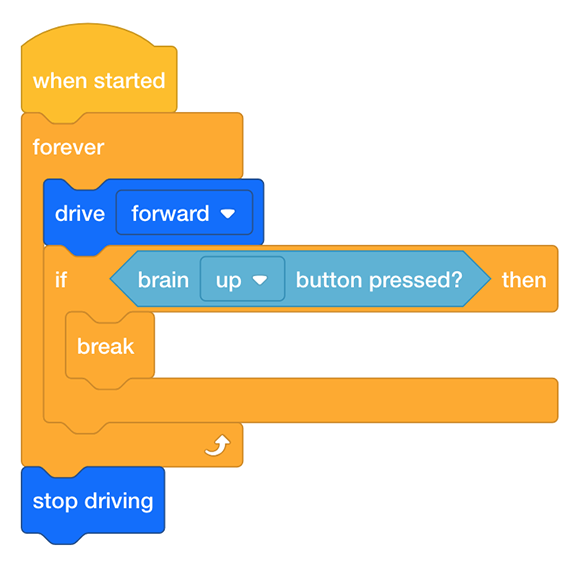
- Dưới đây là ví dụ về khối [Break] được sử dụng để thoát khỏi vòng lặp [Forever].
- Các khối [Đặt vận tốc động cơ] đặt tốc độ của động cơ.

- Vận tốc có thể được đặt thành phần trăm hoặc RPM:
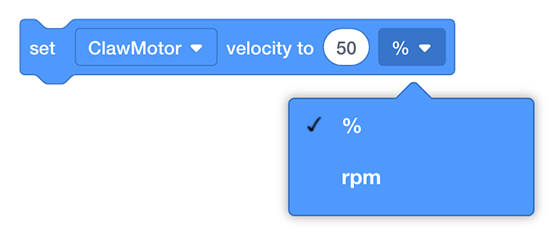
- Vận tốc có thể được đặt thành phần trăm hoặc RPM:
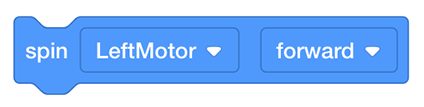
- Khối [Quay] quay một động cơ cho đến khi dừng lại. Động cơ sẽ được dừng lại bằng cách dừng chương trình.
- Khối (vị trí của bộ điều khiển) báo cáo vị trí của Cần điều khiển trên Bộ điều khiển dọc theo trục. Cần điều khiển có số 0 khi được căn giữa trên trục.
- Khối này sẽ cho phép Bộ điều khiển xác định vận tốc của động cơ. Để làm như vậy, hãy kéo khối này từ Hộp công cụ qua vận tốc trong khối [Đặt vận tốc động cơ]; điều này sẽ thay thế vận tốc mặc định bằng vị trí Bộ điều khiển bạn chọn.
Để tìm hiểu thêm thông tin về bất kỳ khối nào trong số này, hãy mở Trợ giúp và chọn (các) khối mà bạn có câu hỏi.
![]() Lời khuyên của giáo viên
Lời khuyên của giáo viên
- Nếu đây là lần đầu tiên sinh viên sử dụng VEXcode IQ, họ có thể tham khảo Hướng dẫn bất cứ lúc nào trong quá trình khám phá này. Các Hướng dẫn được đặt trong Thanh công cụ.

- Đảm bảo mỗi nhóm học viên có tất cả các tài liệu cần thiết.
![]() Hộp công cụ dành cho giáo
viên
- Vai trò khám phá của học sinh
Hộp công cụ dành cho giáo
viên
- Vai trò khám phá của học sinh
Để được trợ giúp tổ chức học viên cho hoạt động này, hãy nhấp vào bên dưới.
Google Doc / .docx / .pdf
Builder trong mỗi nhóm sẽ nhận được phần cứng cần thiết. Người ghi chép nên lấy sổ ghi chép kỹ thuật của nhóm. Lập trình viên nên mở VEXcode IQ.
| Số lượng | Vật liệu cần thiết |
|---|---|
| 1 |
Clawbot |
| 1 |
Đã sạc pin IQ Robot VEX |
| 1 |
VEX IQ Radio |
| 1 |
Kiểm soát viên |
| 1 |
Cáp Tether |
| 1 |
VEXcode IQ |
| 1 |
Cáp USB (nếu sử dụng máy tính) |
| 1 |
Sổ tay kỹ thuật |