
การสำรวจคอนโทรลเลอร์ - ตอนที่ 1
![]() โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
- การสำรวจนี้จะแนะนำให้นักเรียนได้รู้จักกับพฤติกรรมของ Clawbot ที่สามารถตั้งโปรแกรมให้ทำงานร่วมกับคอนโทรลเลอร์ได้:
- การใช้ Clawbot ร่วมกับเทมเพลตคอนโทรลเลอร์ช่วยให้ผู้เรียนสามารถควบคุม Clawbot โดยใช้คอนโทรลเลอร์ได้ มีบล็อกสี่แบบที่แตกต่างกันใน VEXcode IQ ซึ่งสามารถใช้ควบคุมมอเตอร์ของ Clawbot ได้ นักเรียนจะต้องปรับพารามิเตอร์ในบล็อก [ตั้งค่าความเร็วของมอเตอร์] [หมุน] และ (ตำแหน่งของตัวควบคุม) เพื่อควบคุมความเร็วสำหรับมอเตอร์แต่ละตัวของ Clawbot และเปิดใช้งานตัวควบคุมเพื่อควบคุมฟังก์ชันของมอเตอร์
-
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับการเขียนโปรแกรมคอนโทรลเลอร์ โปรดคลิก ด้านล่าง
Google Doc / .docx / .pdf
- ในการทำกิจกรรมของชั้นเรียนโดยรวม ให้ทบทวนบล็อกการเขียนโปรแกรมกับนักเรียน บอกนักเรียนว่ามีบล็อกที่แตกต่างกันสี่บล็อกใน VEXcode IQ ซึ่งสามารถใช้ควบคุมมอเตอร์ของ Clawbot ได้ นักเรียนจะต้องปรับพารามิเตอร์ในบล็อก [ตั้งค่าความเร็วของมอเตอร์] [หมุน] และ (ตำแหน่งของตัวควบคุม) เพื่อควบคุมความเร็วสำหรับมอเตอร์แต่ละตัวของ Clawbot และเปิดใช้งานตัวควบคุมเพื่อควบคุมฟังก์ชันของมอเตอร์
Clawbot พร้อมสำหรับการเขียนโปรแกรมด้วยคอนโทรลเลอร์แล้ว! การสำรวจนี้จะมอบเครื่องมือที่จะช่วยให้คุณสามารถเขียนโปรแกรมการเคลื่อนไหวพื้นฐานบางอย่างภายในโครงการได้
VEXcode IQ ที่จะใช้ในการสำรวจนี้:
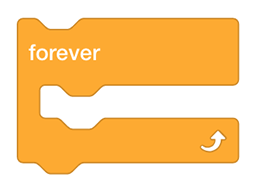
- บล็อก [ตลอดไป] — บล็อกนี้จะวนซ้ำชุดบล็อกตลอดไป สามารถออกจากลูป [ตลอดไป] ได้โดยใช้บล็อก break หรือโดยการหยุดโปรแกรมเท่านั้น บล็อก [ตลอดไป] จะไม่หยุดทำซ้ำ เว้นแต่จะมีบล็อกทำลายวางอยู่ข้างใน
- นี่คือตัวอย่างของการใช้บล็อก [Break] เพื่อออกจากลูป [Forever]
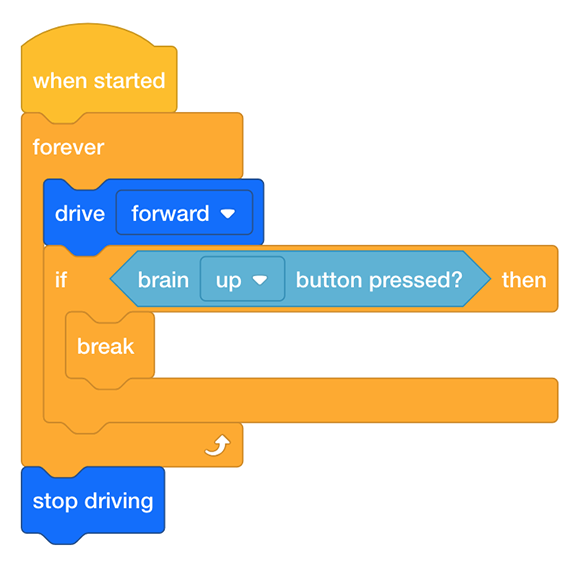
- นี่คือตัวอย่างของการใช้บล็อก [Break] เพื่อออกจากลูป [Forever]
- บล็อก [ตั้งค่าความเร็วของมอเตอร์] จะกำหนดความเร็วของมอเตอร์

- สามารถตั้งค่าความเร็วเป็นเปอร์เซ็นต์หรือรอบต่อนาทีได้:
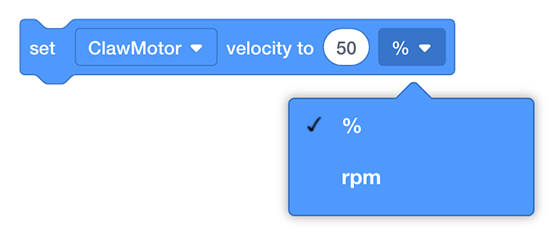
- สามารถตั้งค่าความเร็วเป็นเปอร์เซ็นต์หรือรอบต่อนาทีได้:
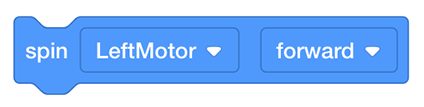
- บล็อก [Spin] จะหมุนมอเตอร์จนกว่าจะหยุด มอเตอร์จะหยุดลงเมื่อหยุดโปรแกรม
- บล็อก (ตำแหน่งของตัวควบคุม) รายงานตำแหน่งของจอยสติ๊กบนตัวควบคุมตามแกน จอยสติ๊กจะมีค่าเป็น 0 เมื่ออยู่ตรงกลางแกน
- บล็อกนี้จะช่วยให้ตัวควบคุมสามารถกำหนดความเร็วของมอเตอร์ได้ เมื่อต้องการทำเช่นนี้ ให้ลากบล็อกนี้จากกล่องเครื่องมือไปเหนือความเร็วในบล็อก [ตั้งค่าความเร็วของมอเตอร์] การกระทำดังกล่าวจะแทนที่ความเร็วเริ่มต้นด้วยตำแหน่งตัวควบคุมที่คุณเลือก
หากต้องการค้นหาข้อมูลเพิ่มเติมเกี่ยวกับบล็อคใดๆ เหล่านี้ ให้เปิดวิธีใช้ และเลือกบล็อคที่คุณมีคำถาม
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
- หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode IQ พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสำรวจครั้งนี้ บทช่วยสอนตั้งอยู่ในแถบเครื่องมือ

- ตรวจสอบให้แน่ใจว่ากลุ่มนักเรียนแต่ละกลุ่มมีวัสดุที่จำเป็นทั้งหมด
![]() กล่องเครื่องมือสำหรับครู
-
บทบาทการสำรวจของนักเรียน
กล่องเครื่องมือสำหรับครู
-
บทบาทการสำรวจของนักเรียน
หากต้องการความช่วยเหลือในการจัดระเบียบนักเรียนสำหรับกิจกรรมนี้ คลิกด้านล่าง
Google Doc / .docx / .pdf
ผู้สร้างในแต่ละกลุ่มควรได้รับฮาร์ดแวร์ที่จำเป็น ผู้บันทึกควรได้รับสมุดบันทึกวิศวกรรมของกลุ่ม โปรแกรมเมอร์ควรเปิด VEXcode IQ
| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
กรงเล็บหุ่นยนต์ |
| 1 |
ชาร์จแบตเตอรี่หุ่นยนต์ VEX IQ แล้ว |
| 1 |
วิทยุ VEX IQ |
| 1 |
ผู้ควบคุม |
| 1 |
สายเทเธอร์ |
| 1 |
วีเอ็กซ์โค้ด ไอคิว |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรม |