
![]() Інструменти для вчителя
вправ
Інструменти для вчителя
вправ
-
Це дослідження познайомить студентів із поведінкою Clawbot, яку можна запрограмувати для роботи з контролером:
-
Ознайомтеся з блоками [Forever], [Set motor velocity] і [Spin]
-
Швидко перевірте, чи Clawbot готовий до роботи
-
Відкрийте VEXcode IQ
-
Створіть простий проект, поданий на уроці
-
Завантажте і запустіть проект
-
Нехай учні потренуються використовувати контролер
-
Завершіть вправу обговоренням
-
-
Використання шаблону Clawbot із контролером дає змогу учням керувати роботом Clawbot за допомогою контролера. У VEXcode IQ є чотири різні блоки, які можна використовувати для керування двигунами Clawbot. Студентам потрібно буде налаштувати параметри в блоках [Set motor velocity], [Spin] і (position of controller), щоб керувати швидкістю кожного двигуна Clawbot і дозволити контролеру керувати функціями двигуна.
-
Щоб дізнатися більше про програмування контролера, клацніть нижче.
-
Перегляньте з учнями блоки програмування в цілому в класі. Скажіть учням, що у VEXcode IQ є чотири різні блоки, які можна використовувати для керування двигунами Clawbot. Студентам потрібно буде налаштувати параметри в блоках [Set motor velocity], [Spin] і (position of controller), щоб керувати швидкістю кожного двигуна Clawbot і дозволити контролеру керувати функціями двигуна.
Clawbot готовий до програмування за допомогою контролера! Це дослідження дасть вам інструменти, щоб мати можливість програмувати деякі основні рухи в рамках проекту.
VEXcode IQ, який буде використовуватися в цьому дослідженні:
-
Блок [Назавжди]—цей блок постійно зациклює набір блоків. Вийти з циклу [Forever] можна лише за допомогою блоку break або зупинки програми. Блок [Назавжди] не припинить повторюватися, якщо всередині нього не буде розміщено блок розриву.
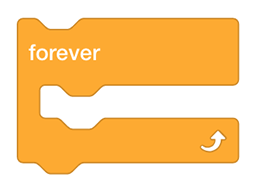
-
Ось приклад блоку [Break], який використовується для виходу з циклу [Forever].
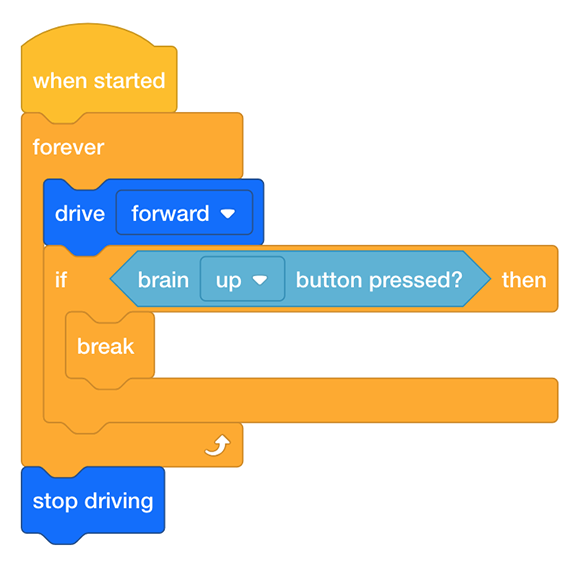
-
-
Блоки [Set motor velocity] встановлюють швидкість двигуна.

-
Швидкість може бути встановлена у відсотках або об/хв:
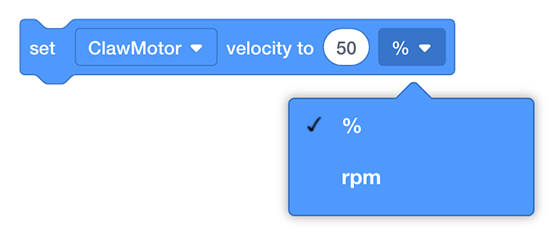
-
-
Блок [Spin] обертає двигун до зупинки. Двигун буде зупинено шляхом зупинки програми.
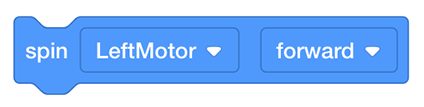
-
Блок (положення контролера) повідомляє про положення джойстика на контролері вздовж осі. Джойстик має значення 0, коли центрується на осі.
-
Цей блок дозволить контролеру визначати швидкість двигуна. Для цього перетягніть цей блок із панелі інструментів на швидкість у блоці [Set motor velocity]; це замінить швидкість за замовчуванням на положення контролера за вашим вибором.
-
Щоб дізнатися більше про будь-який із цих блоків, відкрийте довідку та виберіть блок(и), щодо яких у вас є запитання.
![]() Поради вчителю
Поради вчителю
- Якщо учні вперше використовують VEXcode IQ, вони можуть звернутися до посібників у будь-який час під час цього дослідження. Підручники розташовані на панелі інструментів.

- Переконайтеся, що кожна група студентів має всі необхідні матеріали.
![]() Інструменти вчителя
-
Дослідницькі ролі учнів
Інструменти вчителя
-
Дослідницькі ролі учнів
Щоб отримати допомогу в організації студентів для цієї діяльності, натисніть нижче.
Будівельник у кожній групі повинен отримати необхідне обладнання. Реєстратор повинен отримати інженерний зошит групи. Програміст повинен відкрити VEXcode IQ.
| Кількість | Необхідні матеріали |
|---|---|
| 1 |
Clawbot |
| 1 |
Заряджена батарея робота VEX IQ |
| 1 |
Радіо VEX IQ |
| 1 |
Контролер |
| 1 |
Тетерний кабель |
| 1 |
VEXcode IQ |
| 1 |
USB-кабель (якщо використовується комп’ютер) |
| 1 |
Інженерний зошит |