
![]() 教師用ツールボックス
教師用ツールボックス
-
このセクションの目的
この「再考」セクションでは、生徒がブロックを使用して走行速度と旋回速度を設定する追加のアクティビティに参加できます。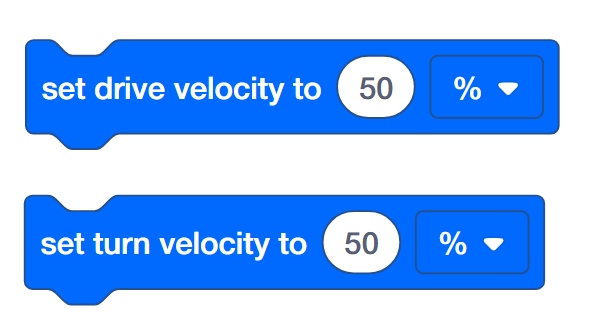
このセクションには以下が含まれます。
-
リミックスアクティビティ:
-
鬼ごっこ、あなたです!: 素早く曲がって、ゆっくり走って、素早く曲がって鬼ごっこをしましょう!
-
お城を守れ!: 正方形内を移動して侵入者からお城を守りましょう!
-
ロボットウェイター: こぼさないでください!
-
-
リミックスの質問
学生はグループと協力してプロジェクトをさらに発展させ、自分の考えやアイデアをエンジニアリング ノートに記録します。
-
-
生徒の役割の再考
このセクションの始めに、生徒をグループに分け、役割を選ばせます。 提案される役割については、次のいずれかのリンク (Google Doc/.docx/.pdf) をクリックします。 -
ブロックの理解
生徒は、ブロックによって追跡距離と維持速度がどのように決まるのかを自発的に質問するかもしれません。 これは、VEXcode IQ を使用したプログラミングには必要な情報ではありません。 ただし、[drive for]、[turn for]、[set drive velocity]、[set turn velocity] の各ブロックがロボットのソフトウェア内でどのように機能するかについて詳しく理解するには、次のいずれ のリンク (Google Doc/.docx/.pdf) をクリックしてください。
![]() 教師のヒント
教師のヒント
-
学生が VEXcode IQ を簡単に確認する必要がある場合は、この調査中にいつでもチュートリアルを参照できます。 チュートリアルはツールバーにあります。 学生はチュートリアルを使用して、プロジェクトの保存、ダウンロード、実行を他のスキルとともに復習できます。

-
各生徒グループが必要な資料をすべて持っていることを確認してください。
-
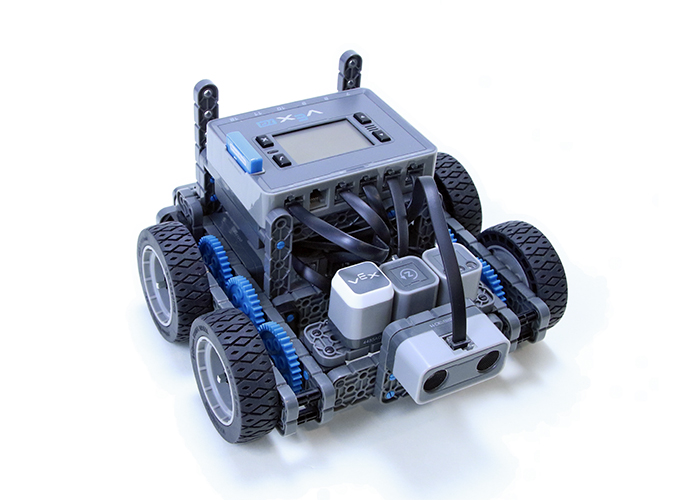
オートパイロットの準備ができているかどうかを確認するモデル。 ビルダーの役割を果たした生徒は、アクティビティ全体を通じてオートパイロットをチェックする必要があります。
適切な速度を設定する
オートパイロットをさまざまな速度で動かすことができました。 オートパイロットをプログラムするために適切な速度を設定する方法を見てみましょう。
-
各グループのビルダーは、必要なハードウェアを入手する必要があります。
-
記録者はグループのエンジニアリング ノートを取得する必要があります。
-
プログラマーは VEXcode IQ を開く必要があります。
| 量 | 必要な材料 |
|---|---|
| 1 |
1x1 コネクタピン |
| 1 |
充電済みのロボットバッテリー |
| 1 |
VEXcode IQ (最新バージョン、Windows、macOS、Chromebook、iPad) |
| 1 |
USB ケーブル (コンピューターを使用する場合) |
| 1 |
エンジニアリングノート |
![]() 教師のヒント
教師のヒント
-
Autopilot のモーターとセンサーの構成を確認するには、次のいずれ のリンク (Google Doc/.docx/.pdf) をクリックします。
アクティビティを始める前に...
アクティビティを始める前に、これらのアイテムはすべて準備されていますか? ビルダーは次のそれぞれを確認する必要があります。
-
すべてのモーターとセンサーが正しいポートに接続されていますか?
-
スマート ケーブル すべてのモーターとセンサーに完全に挿入されていますか?
-
バッテリーは充電されて ?