
![]() 教师工具箱
教师工具箱
-
本节的目的
本“重新思考”部分将允许学生使用用于设置驾驶和转弯速度的块来参与其他活动。
本节包括:
-
混音活动:
-
标记你就是它!: 快速转弯,缓慢行驶,快速转弯玩追逐游戏!
-
保护城堡!: 沿方格移动,保护城堡免受入侵者的侵害!
-
机器人服务员: 不要洒出来!
-
-
混音问题
学生将与他们的小组合作,进一步开发他们的项目,并在工程笔记本中记录他们的想法和想法。
-
-
学生重新思考角色
在本节开始时,将学生分成小组并让学生选择自己的角色。 单击以下链接之一 (Google Doc/.docx/.pdf) 获取建议的角色。 -
理解积木
学生可能会自发地问积木如何跟踪距离并保持速度。 这不是使用 VEXcode IQ 编程的必要信息。 但是,要了解有关 [drive for]、[turn for]、[set drive velocity] 和 [set turn velocity] 块在机器人软件中的工作方式的更多信息,请 以下链接之一(Google Doc/.docx/.pdf)。
![]() 教师提示
教师提示
-
如果学生需要快速回顾 VEXcode IQ,他们可以在调查期间随时参考教程。 教程位于工具栏中。 学生可以使用教程来复习保存、下载和运行项目以及其他技能。

-
确保每个学生小组都有所有必要的材料。
-
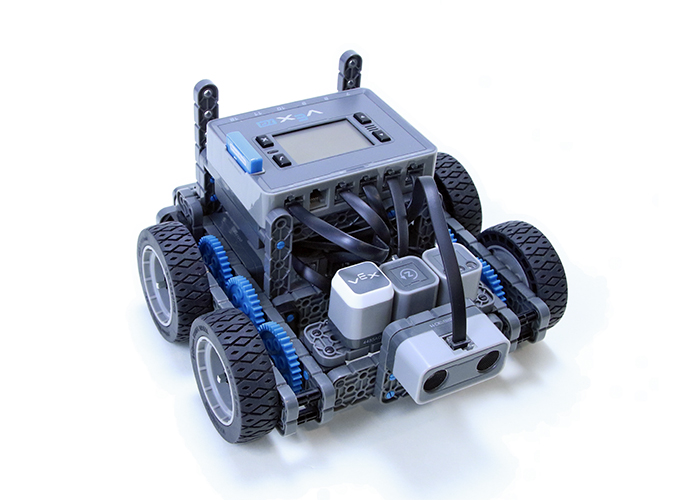
模型检查自动驾驶仪是否准备就绪。 扮演建造者角色的学生应该在整个活动过程中检查自动驾驶仪。
设置适当的速度
你让你的自动驾驶仪以不同的速度移动! 让我们探讨如何设置适当的速度来对自动驾驶仪进行编程。
-
每个组中的建造者应该获得所需的硬件。
-
记录员应该拿到小组的工程笔记本。
-
程序员应打开 VEXcode IQ。
| 数量 | 所需材料 |
|---|---|
| 1 |
1x1 连接器针脚 |
| 1 |
充满电的机器人电池 |
| 1 |
VEXcode IQ(最新版本,Windows、macOS、Chromebook、iPad) |
| 1 |
USB 电缆(如果使用计算机) |
| 1 |
工程笔记本 |
![]() 教师提示
教师提示
-
要查看自动驾驶仪电机和传感器的配置,请单击 链接之一(Google Doc/.docx/.pdf)。