
अभ्यास
पिछले अनुभाग में आपने सीखा कि दूरी मापने, वस्तुओं और उनके सापेक्ष आकार का पता लगाने, तथा वस्तु वेग की रिपोर्ट करने के लिए दूरी सेंसर का उपयोग कैसे किया जाता है। आपने सीखा कि डिस्टेंस सेंसर कैसे काम करता है, और VEXcode IQ का उपयोग करके इसे कैसे कोड किया जाता है। इस गतिविधि में, आपने जो सीखा है उसे अपने रोबोट को कोड करने के लिए लागू करेंगे ताकि वह एक क्यूब का पता लगा सके और उसे फील्ड से बाहर धकेल सके।
अभ्यास गतिविधि में, आप एक क्यूब का पता लगाने और उसे फील्ड से बाहर धकेलने के लिए एक VEXcode IQ प्रोजेक्ट बनाएंगे, यह सुनिश्चित करते हुए कि रोबोट स्वयं फील्ड के किनारे से नहीं गिर जाए। आप अपने प्रोजेक्ट पर पुनरावृत्ति करेंगे ताकि यह सुनिश्चित हो सके कि क्यूब की प्रारंभिक स्थिति बदल जाने पर भी रोबोट यह कार्य पूरा कर सके। नीचे दिए गए वीडियो को देखें कि आपने जो सीखा है उसे पुश इट ऑफ अभ्यास गतिविधि को पूरा करने के लिए कैसे लागू कर सकते हैं।
अब पुश इट ऑफ अभ्यास गतिविधि को पूरा करने की आपकी बारी है!
इस एनीमेशन में, रोबोट क्यूब की दिशा में मुड़ता है, उसकी ओर बढ़ता है, और उसे मैदान से बाहर धकेल देता है। इसके बाद रोबोट और क्यूब को रीसेट कर दिया जाता है, इस बार क्यूब एक अलग स्थिति में होता है। रोबोट क्यूब की ओर घूमता है और उसे मैदान से बाहर धकेल देता है। यह एनीमेशन एक उदाहरण दिखाता है कि पुश इट ऑफ गतिविधि को पूरा करने के लिए एक प्रोजेक्ट कैसे बनाया जा सकता है।
अभ्यास गतिविधि को पूरा करने के लिए इस दस्तावेज़ को संदर्भ के रूप में उपयोग करें। Google / .docx / .pdf
जैसे ही आप पुश इट ऑफ गतिविधि पूरी कर लें, अपनी परियोजनाओं और परीक्षणों को अपनी इंजीनियरिंग नोटबुक में दर्ज कर लें।
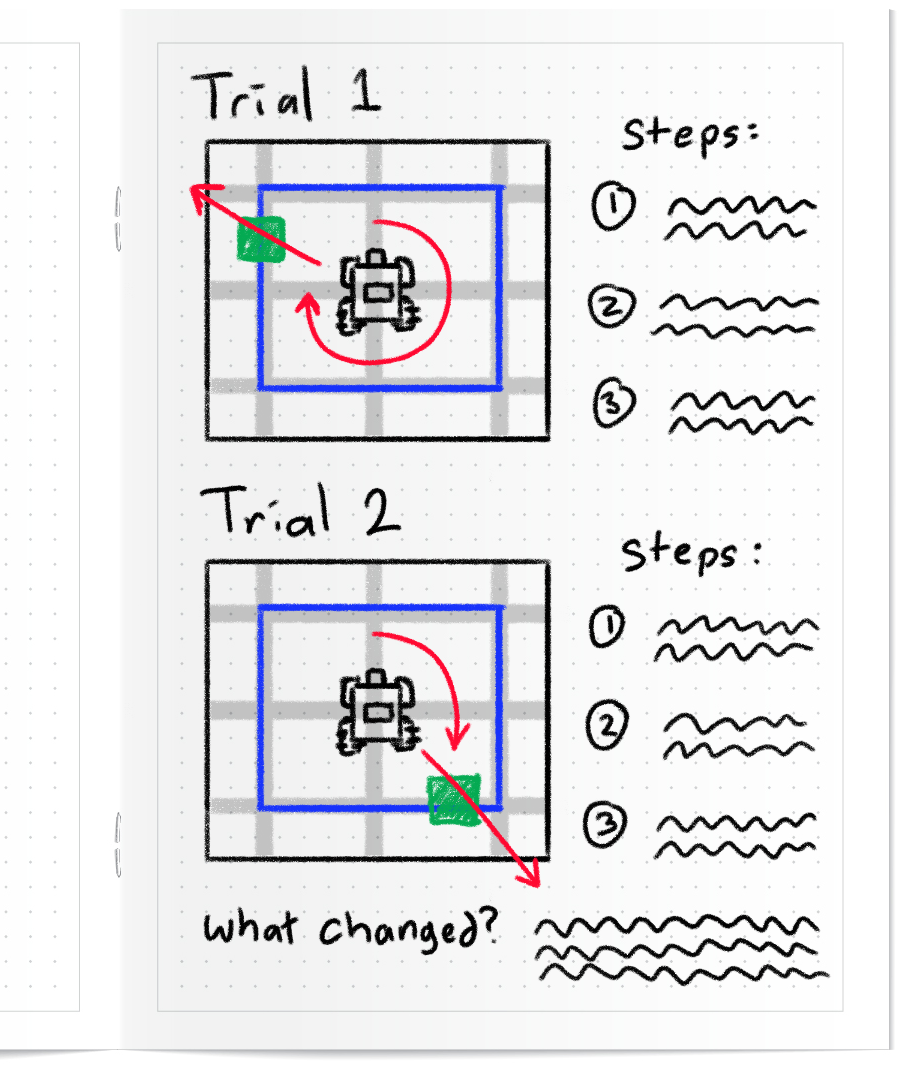
- यह दिखाने के लिए एक चित्र बनाएं कि गतिविधि को पूरा करने के लिए आपके रोबोट को कैसे चलना चाहिए
- अपनी तस्वीर के आधार पर प्रोजेक्ट बनाने के लिए आवश्यक चरणों की सूची बनाएं
- प्रत्येक पुनरावृत्ति के बाद आपके द्वारा किए गए परिवर्तनों का दस्तावेजीकरण करें
अपने प्रोजेक्ट विचारों और परीक्षणों को कैसे रिकॉर्ड कर सकते हैं, इसके उदाहरण के लिए बाईं ओर की छवि देखें।
प्रतिस्पर्धा (अगले पृष्ठ पर) में, आप अपने रोबोट को क्यूब क्रैशर चैलेंज में जितनी जल्दी हो सके मैदान से चार क्यूब्स को गिराने के लिए कोड करेंगे।
नीचे दिए गए एनीमेशन को देखें और देखें कि आपका रोबोट क्यूब क्रैशर चैलेंज को पूरा करने के लिए किस प्रकार आगे बढ़ सकता है। बेसबोट मैदान के मध्य से शुरू होता है, जिसके चारों ओर की रेखाओं पर चार क्यूब्स बेतरतीब ढंग से रखे जाते हैं। रोबोट पहले घन का पता लगाएगा और उसे धकेलेगा, फिर दूसरे घन का पता लगाने के लिए आगे बढ़ेगा। इसके बाद एनीमेशन में समयबद्ध परीक्षण का अंत दिखाया जाता है, जब चौथे क्यूब को मैदान से बाहर धकेल दिया जाता है।
चुनौती को पूरा करना सीखें, अपनी समझ की जांच करें, फिर चुनौती के लिए अभ्यास करें।
अपनी समझ की जाँच करें
चुनौती शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में प्रश्नों के उत्तर देकर चुनौती के नियमों और सेटअप को समझते हैं।
अपनी समझ की जाँच करें प्रश्न Google / .docx / .pdf
प्रश्नों को पूरा करने के बाद चुनौती का अभ्यास करें।
क्यूब क्रैशर चैलेंज में प्रतिस्पर्धा करने के लिए अगला > चुनें।