
Pratica
Nell'ultima sezione hai imparato come usare il sensore di distanza per misurare la distanza, rilevare oggetti e le loro dimensioni relative e segnalare la velocità degli oggetti. Hai imparato come funziona il sensore di distanza e come codificarlo utilizzando VEXcode IQ. In questa attività, applicherai ciò che hai imparato per programmare il tuo robot per individuare un cubo e spingerlo fuori dal campo.
Nell'attività pratica, creerai un progetto VEXcode IQ per individuare un cubo e spingerlo fuori dal campo, assicurandoti che il robot stesso non cada dal bordo del campo. Ripeterai il progetto per assicurarti che il robot possa completare questa attività anche se la posizione di partenza del cubo cambia. Guarda il video qui sotto per vedere come puoi applicare ciò che hai imparato per completare l'attività pratica Spingilo via.
Adesso tocca a te completare l'attività pratica Push it Off !
In questa animazione, il robot gira nella direzione del cubo, si dirige verso di esso e lo spinge fuori dal campo. Quindi il robot e il cubo vengono ripristinati, con il cubo questa volta in una posizione diversa. Il robot ruota verso il cubo e lo spinge fuori dal campo. Questa animazione mostra un esempio di come creare un progetto per completare l'attività Spingilo fuori .
Utilizzare questo documento come riferimento per completare l'attività pratica. Google / .docx / .pdf
Una volta completata l'attività Push it Off, documenta i tuoi progetti e test nel tuo quaderno di progettazione.
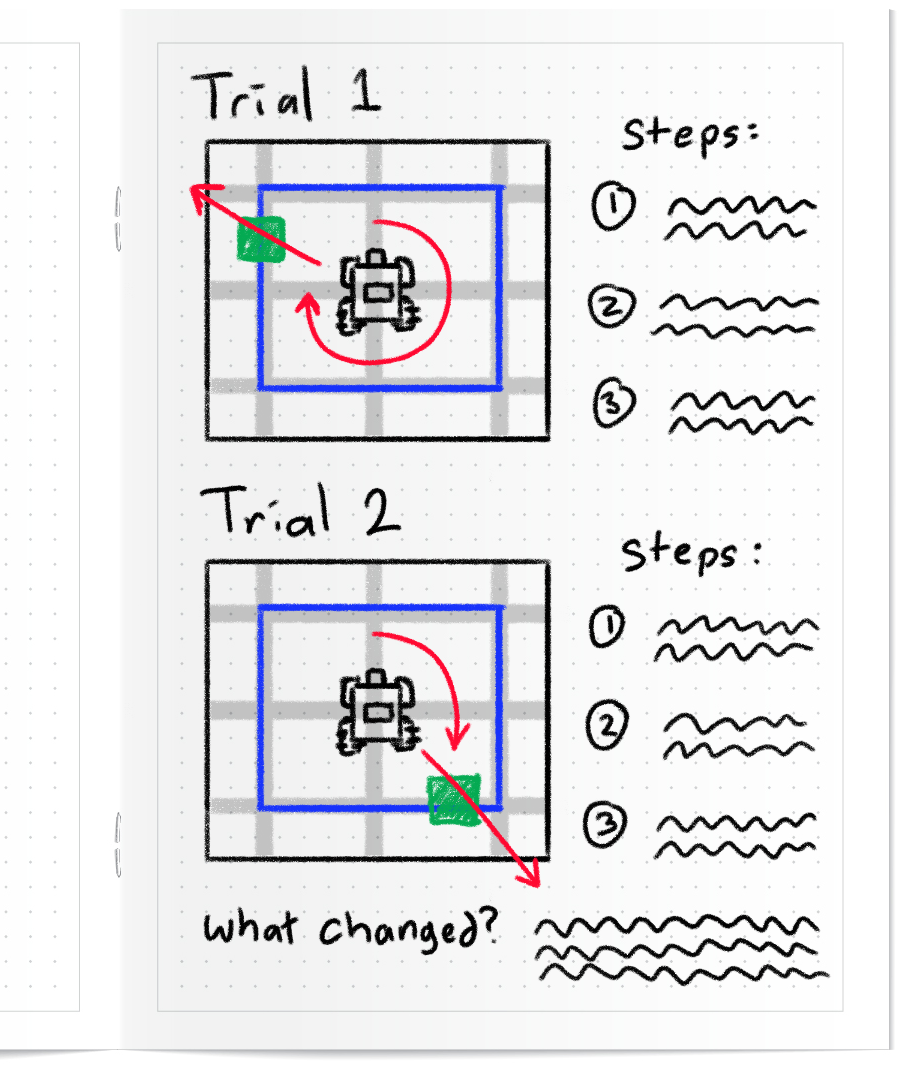
- Disegna un'immagine per mostrare come dovrebbe muoversi il tuo robot per completare l'attività
- Elenca i passaggi necessari per creare un progetto basato sulla tua immagine
- Documenta le modifiche apportate dopo ogni iterazione
Per un esempio di come registrare le idee e i test del tuo progetto, guarda l'immagine a sinistra.
In Compete (nella pagina successiva), dovrai programmare il tuo robot affinché faccia cadere quattro cubi dal campo il più velocemente possibile nella Cube Crasher Challenge. Guarda l'animazione a sinistra per vedere un esempio di come il robot potrebbe muoversi per rilevare e rimuovere i cubi nella sfida. Scopri come completare la sfida , verifica la tua comprensione, quindi esercitati per la sfida.
L'obiettivo di questa sfida è far sì il tuo robot spinga tutti e quattro i cubi fuori dal campo il più velocemente possibile, senza però cadere.
Guarda questa animazione per vedere un esempio di come il tuo robot potrebbe muoversi per completare la sfida Cube Crasher.
Segui i passaggi in questo documento per saperne di più su come completare questa sfida. Google / .docx / .pdf
Controlla la tua comprensione
Prima di iniziare la sfida, assicurati di aver compreso le regole e la configurazione della sfida rispondendo alle domande nel documento sottostante sul tuo quaderno di progettazione.
Verifica la tua comprensione domande Google / .docx / .pdf
Dopo aver completato le domande, prova a mettere in pratica la sfida.
Seleziona Avanti > per partecipare alla sfida Cube Crasher .