
練習する
前のセクションでは、距離センサーを使用して距離を測定し、物体とその相対的なサイズを検出し、物体の速度を報告する方法を学びました。 距離センサーの仕組みと、VEXcode IQ を使用して距離センサーをコーディングする方法を学びました。 このアクティビティでは、学んだことを応用してロボットをコーディングし、立方体を見つけてフィールドから押し出します。
演習アクティビティでは、立方体を見つけてフィールドから押し出すための VEXcode IQ プロジェクトを作成し、ロボット自体がフィールドの端から落ちないようにします。 プロジェクトを反復して、立方体の開始位置が変更された場合でもロボットがこのタスクを完了できることを確認します。 以下のビデオを見て、学んだことを応用して Push it Off の練習アクティビティを完了する方法を確認してください。
次は、「Push it Off 練習アクティビティを完了する番です。
Push it Off アクティビティを完了したら、プロジェクトとテスト エンジニアリング ノートブックに文書化します。
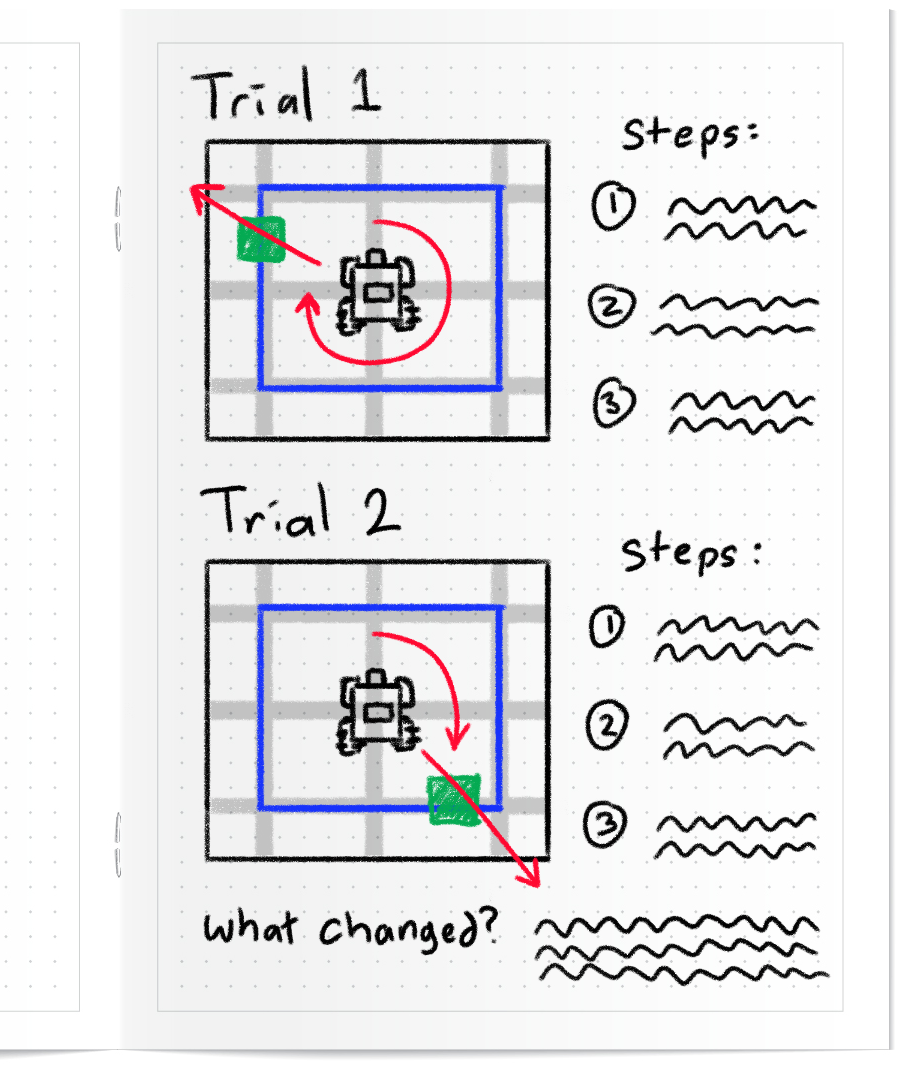
- アクティビティを完了するためにロボットがどのように動くべきかを示す絵を描いてください。
- に基づいてプロジェクトを作成するために必要な手順をリストします。
- 各反復後に加えた変更を文書化する
プロジェクトのアイデアとテストを記録する方法の例については、左側の 画像を参照してください。
「競争」 (次のページ) では、キューブ クラッシャー チャレンジで 4 つのキューブをできるだけ早くフィールドからたたき落とすようにロボットをコーディングします。 チャレンジを完了する方法を学び、理解度を確認してから、チャレンジに向けて練習してください。