
การสำรวจความเร็ว - ส่วนที่ 1
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
-
โครงร่างกิจกรรม การสำรวจ
นี้จะแนะนำให้นักเรียนรู้จักการตั้งค่าความเร็วในการขับขี่ก่อนจากนั้นขอให้พวกเขาทดสอบการตั้งค่าความเร็วในการเลี้ยว คลิก (GoogleDoc/.docx/.pdf) เพื่อดูโครงร่างของกิจกรรมนี้ -
สิ่งที่นักเรียนจะตั้งโปรแกรม
การใช้การกำหนดค่าหุ่นยนต์ระบบขับเคลื่อนช่วยให้นักเรียนเปลี่ยนการตั้งค่าความเร็วของบล็อก [drive for] และ [turn for] ได้ง่ายๆโดยเพิ่มบล็อก [set drive speed] หรือ [set turn speed] ลงในสแต็ค ส่วนที่แนะนำของกิจกรรมให้นักเรียนทำงานกับบล็อก [set drive velocity] และตอนท้ายของกิจกรรมขอให้พวกเขานำสิ่งที่ได้เรียนรู้ไปใช้กับบล็อก [set turn velocity]สำหรับข้อมูลเพิ่มเติมเกี่ยวกับสิ่งที่นักเรียนถูกขอให้สร้างในส่วนเล่นให้คลิกหนึ่งในลิงก์เหล่านี้(GoogleDoc/.docx/.pdf)
-
บทบาทการสำรวจของนักเรียน
สำหรับความช่วยเหลือในการจัดกิจกรรมนี้ให้คลิกหนึ่งในลิงก์เหล่านี้ (Google Doc/.docx/.pdf)
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode IQ พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสำรวจนี้ บทช่วยสอนอยู่ในแถบเครื่องมือ

- คลิก หนึ่งในลิงก์เหล่านี้ (GoogleDoc/.docx/.pdf) เพื่อดูคำแนะนำในการสาธิตว่า Drivetrain และ Drive Block เกี่ยวข้องกันอย่างไร
- ตรวจสอบให้แน่ใจว่านักเรียนแต่ละกลุ่มมีเอกสารที่จำเป็นทั้งหมด
ระบบขับเคลื่อนอัตโนมัติพร้อมที่จะขับขี่ด้วยความเร็วที่แตกต่างกัน!
การสำรวจนี้จะให้เครื่องมือเพื่อให้คุณสามารถเริ่มสร้างโครงการที่สามารถเคลื่อนมอเตอร์ของ
Autopilot ด้วยความเร็วที่เหมาะสมกับวัตถุประสงค์ของหุ่นยนต์
VEXcode IQ
จะถูกใช้ในส่วนแรกของการสำรวจนี้:
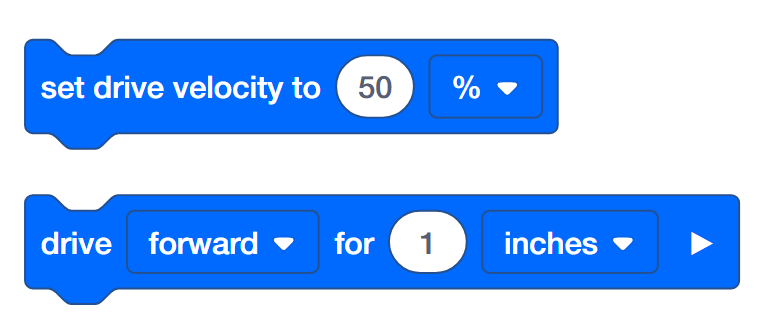
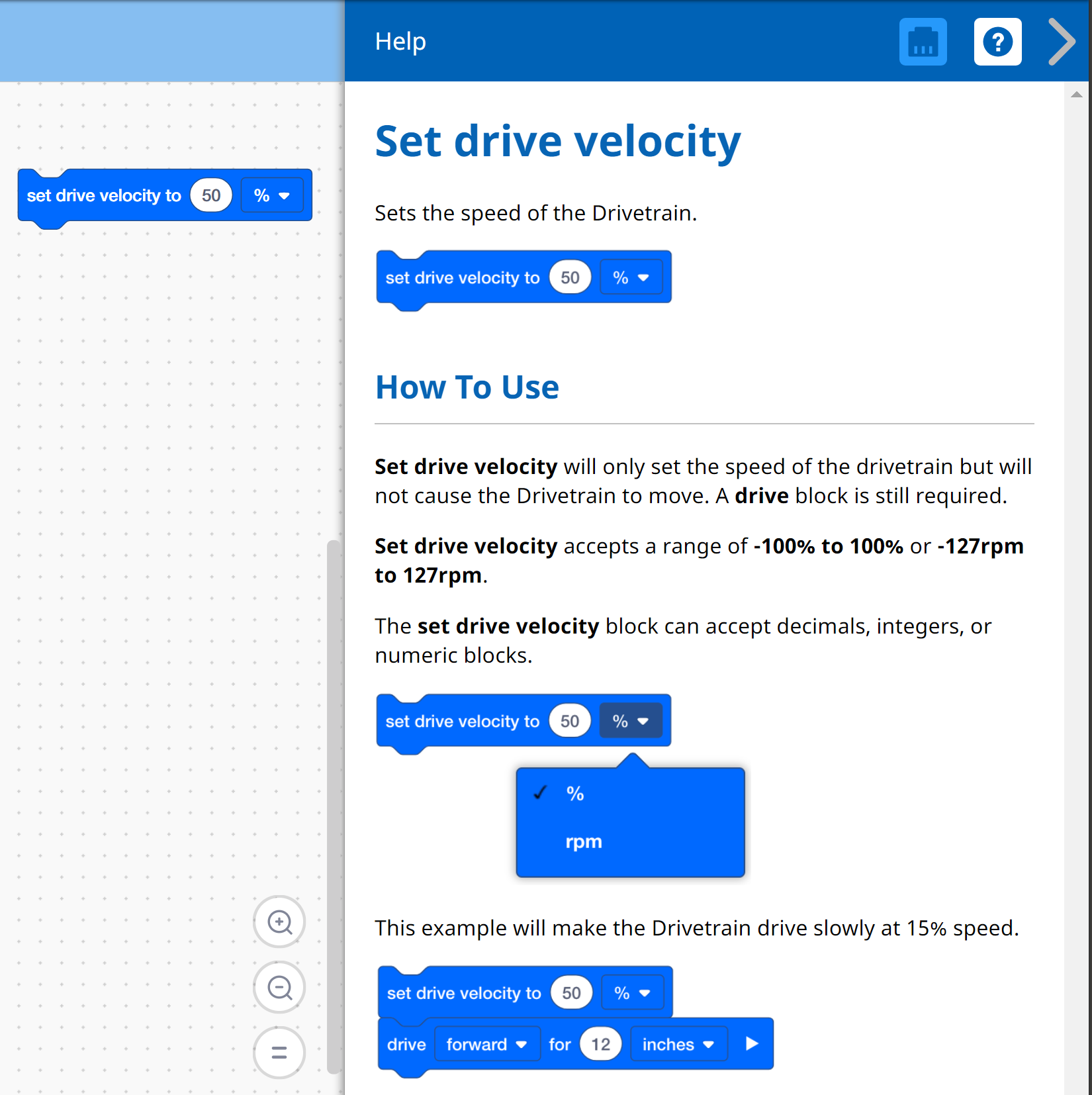
หากต้องการดูข้อมูลเพิ่มเติมเกี่ยวกับบล็อกให้เปิดความช่วยเหลือแล้วเลือกบล็อกที่คุณต้องการอ่าน
Builder ในแต่ละกลุ่มควรได้รับฮาร์ดแวร์ที่ต้องการ ผู้บันทึกควรได้รับสมุดบันทึกวิศวกรรมของกลุ่ม โปรแกรมเมอร์ควรเปิด VEXcode IQ
| จำนวน | วัสดุที่จำเป็น |
|---|---|
| 1 |
หุ่นยนต์ขับเคลื่อนอัตโนมัติ |
| 1 |
หมุดตัวเชื่อมต่อ 1x1 |
| 1 |
แบตเตอรี่หุ่นยนต์ชาร์จ |
| 1 |
VEXcode IQ |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรม |
ขั้นตอนที่ 1: การเตรียมความพร้อมสำหรับการสำรวจ
ก่อนที่คุณจะเริ่มกิจกรรมคุณมีไอเท็มแต่ละรายการเหล่านี้พร้อมหรือยัง? ผู้สร้างควรตรวจสอบแต่ละข้อต่อไปนี้:
- มอเตอร์และเซ็นเซอร์ทั้งหมดเสียบเข้ากับพอร์ตที่ถูกต้องหรือไม่?
- สายเคเบิลอัจฉริยะเสียบ เข้ากับมอเตอร์และเซ็นเซอร์ทั้งหมดหรือไม่?
- สมอง เปิดอยู่หรือเปล่า?
- มีการ ชาร์จแบตเตอรี่หรือไม่?
ขั้นตอนที่ 2: เริ่มโปรเจกต์ใหม่
ก่อนที่คุณจะเริ่มโปรเจกต์โปรแกรมเมอร์จะต้องเลือกโปรเจกต์เทมเพลตที่ถูกต้อง เทมเพลตขับเคลื่อนอัตโนมัติมีการกำหนดค่ามอเตอร์และเซ็นเซอร์ขับเคลื่อนอัตโนมัติ หากไม่ได้ใช้เทมเพลตหุ่นยนต์ของคุณจะไม่สามารถเรียกใช้โปรเจกต์ได้อย่างถูกต้อง
โปรแกรมเมอร์ควรทำตามขั้นตอนต่อไปนี้:
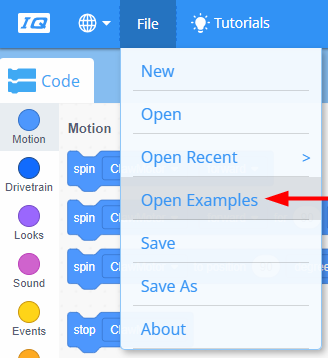
- เปิดเมนูไฟล์
- เลือก ตัวอย่างแบบเปิด
-
ใช้แถบตัวกรองที่ด้านบนของแอปพลิเคชันและเลือก "เทมเพลต"
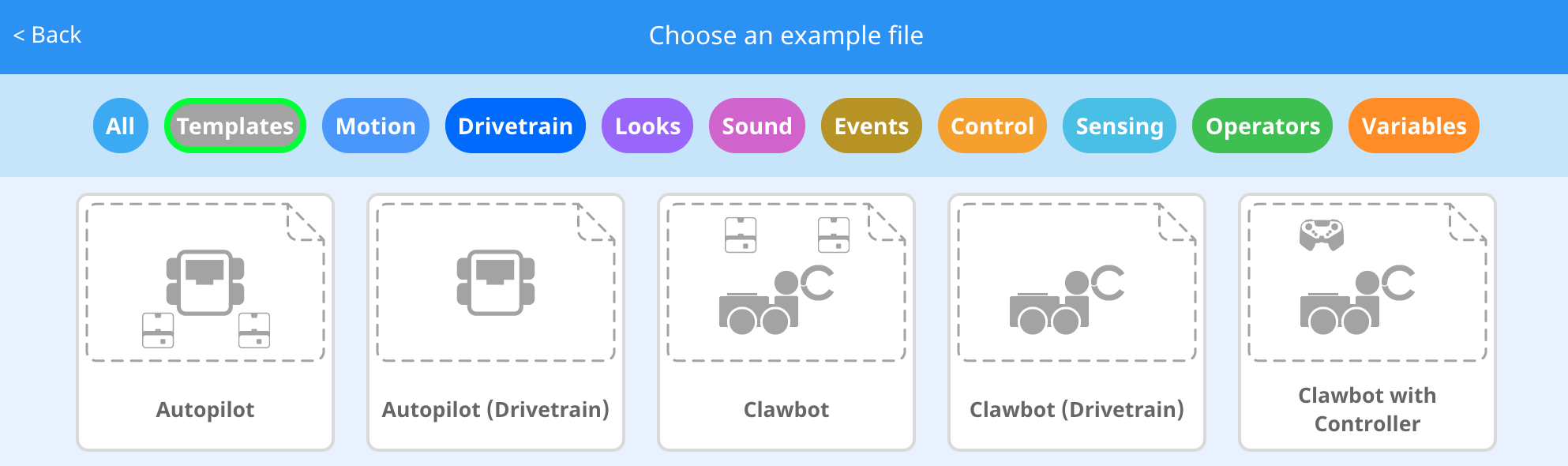
-
เลือกและเปิดเท มเพลตระบบขับเคลื่อนอัตโนมัติ (ระบบขับเคลื่อน)
- เปลี่ยนชื่อโปรเจกต์ของคุณ Drive Velocity เพราะเราจะใช้บล็อก [set drive velocity]
- บันทึกโปรเจกต์ของ คุณ คลิกที่ลิงก์ใดลิงก์หนึ่งต่อไปนี้เพื่อดูข้อมูลเพิ่มเติมเกี่ยวกับการบันทึก: macOS, Windows, Chromebook, iPad

- ตรวจสอบให้แน่ใจว่าชื่อโปรเจกต์ Drive Velocity อยู่ในหน้าต่างตรงกลางของแถบเครื่องมือแล้ว
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู

- การบันทึกโครงการ
ชี้ให้เห็นว่าเมื่อพวกเขาเปิด VEXcode IQ เป็นครั้งแรกหน้าต่างจะถูก ระบุว่าโครงการ VEXcode และไม่ได้บันทึกไว้ (ระบุไว้บนแถบเครื่องมือ) โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อ VEXcode IQ เปิดขึ้นเป็นครั้งแรก เมื่อเปลี่ยนชื่อโปรเจกต์เป็น Drive Velocity และบันทึกแล้วหน้าจอจะอัปเดตเป็นบันทึกแล้ว การใช้หน้าต่างนี้ในแถบเครื่องมือเป็นเรื่องง่ายที่จะตรวจสอบว่านักเรียนกำลังใช้โครงการที่ถูกต้องและมีการบันทึกไว้
เมื่อบันทึกโปรเจกต์ในตอนแรก VEXcode IQ จะบันทึกการเปลี่ยนแปลงที่ตามมาโดยอัตโนมัติตามที่ระบุไว้ในข้อความถัดจากชื่อโปรเจกต์
บอกนักเรียนว่าตอนนี้พวกเขาพร้อมที่จะเริ่มโครงการแรกแล้ว อธิบายให้นักเรียนฟังว่าโดยทำตามขั้นตอนง่ายๆเพียงไม่กี่ขั้นตอนพวกเขาจะสามารถสร้างและเรียกใช้โครงการที่จะกำหนดความเร็วของระบบขับเคลื่อนของระบบขับเคลื่อนอัตโนมัติได้ - Stop and
Discuss
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวและให้กลุ่มนักเรียนทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโครงการใหม่ใน VEXcode IQ คลิกหนึ่งในลิงก์ต่อไปนี้ (GoogleDoc/.docx/.pdf) เพื่อดูคำแนะนำ