
استكشاف السرعة - الجزء 1
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
-
مخطط النشاط سيعرف
هذا الاستكشاف الطلاب أولاً على ضبط السرعة للقيادة ثم يطلب منهم اختبار ضبط السرعة للدوران. انقر على (Google Doc/.docx/.pdf) للحصول على المخطط التفصيلي لهذا النشاط. -
ما سيبرمج الطلاب
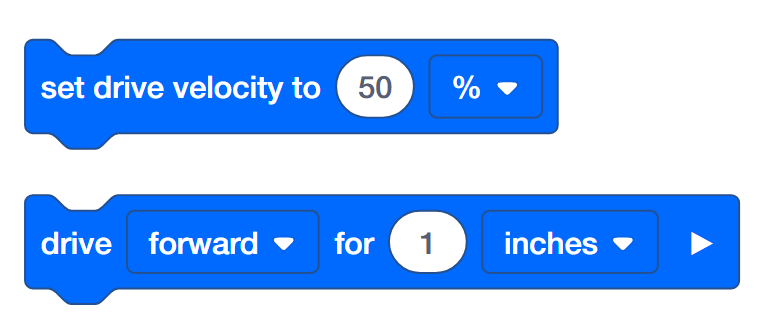
باستخدام تكوين روبوت مجموعة الدفع يسمح للطلاب بتغيير إعدادات السرعة لكتل [drive for] و [turn for] ببساطة عن طريق إضافة كتلة [set drive velocity] أو [set turn velocity] إلى كومة. الجزء الموجه من النشاط يجعل الطلاب يعملون مع كتلة [ضبط سرعة القيادة] وتطلب منهم نهاية النشاط تطبيق ما تعلموه على استخدام كتلة [ضبط سرعة الدوران].لمزيد من المعلومات حول ما يُطلب من الطلاب إنشاؤه في قسم التشغيل، انقر فوق أحد هذه الروابط (Google Doc/.docx/.pdf).
-
أدوار استكشاف الطلاب للمساعدة
في تنظيم الطلاب لهذا النشاط، انقر فوق أحد هذه الروابط (Google Doc/.docx/.pdf).
![]() نصائح للمعلم
نصائح للمعلم
-
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode IQ، فيمكنه الرجوع إلى البرامج التعليمية في أي وقت أثناء هذا الاستكشاف. توجد البرامج التعليمية في شريط الأدوات.

- انقر على أحد هذه الروابط (Google Doc/.docx/.pdf) للحصول على اقتراحات لتوضيح كيفية ارتباط نظام نقل الحركة وكتل محركات الأقراص.
- تأكد من أن كل مجموعة من الطلاب لديها جميع المواد اللازمة.
الطيار الآلي جاهز للقيادة بسرعات مختلفة!
سيمنحك هذا الاستكشاف الأدوات اللازمة لتتمكن من البدء في إنشاء مشاريع يمكنها تحريك محركات
الطيار الآلي بسرعات تناسب غرض الروبوت. سيتم
استخدام VEXcode IQ في الجزء الأول من
هذا الاستكشاف:
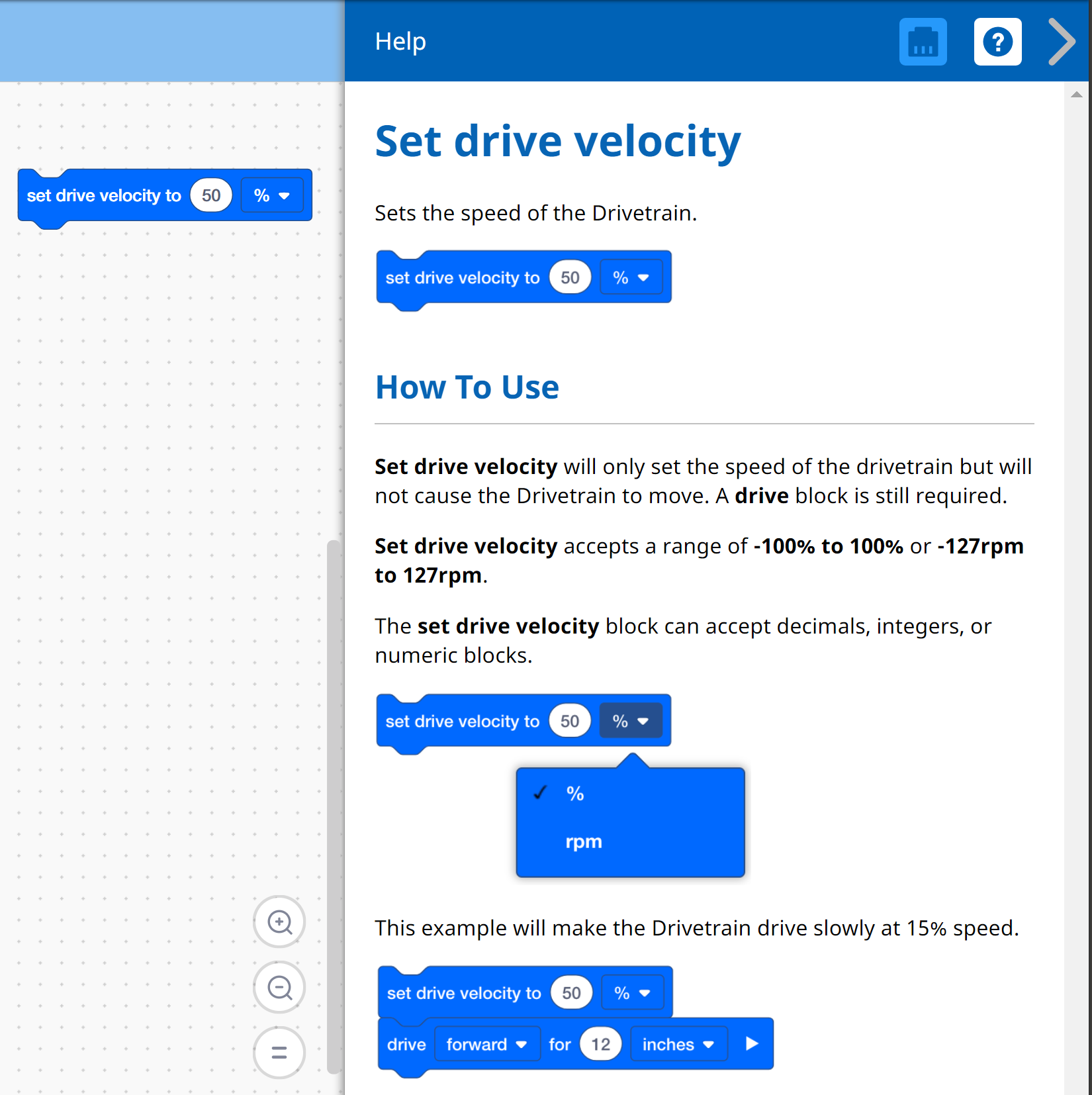
لمعرفة المزيد من المعلومات حول المكوِّن، افتح التعليمات ثم حدد المكوِّن الذي تريد
القراءة عنه.
يجب أن يحصل المنشئ في كل مجموعة على الأجهزة المطلوبة. يجب أن يحصل المسجل على دفتر الملاحظات الهندسي للمجموعة. يجب على المبرمج فتح VEXcode IQ.
| الكمية | المواد اللازمة |
|---|---|
| 1 |
روبوت الطيار الآلي |
| 1 |
دبوس موصل 1 × 1 |
| 1 |
بطارية روبوت مشحونة |
| 1 |
VEXcode IQ |
| 1 |
كابل USB (في حالة استخدام جهاز كمبيوتر) |
| 1 |
دفتر ملاحظات هندسي |
الخطوة 1: التحضير للاستكشاف
قبل أن تبدأ النشاط، هل لديك كل من هذه العناصر جاهزة ؟ يجب على الباني التحقق من كل مما يلي:
- هل تم توصيل جميع المحركات وأجهزة الاستشعار بالمنفذ الصحيح ؟
- هل يتم إدخال الكابلات الذكية بالكامل في جميع المحركات وأجهزة الاستشعار ؟
- هل الدماغ قيد التشغيل؟
- هل البطارية مشحونة؟
الخطوة 2: بدء مشروع جديد
قبل أن تبدأ مشروعك، يحتاج المبرمج إلى تحديد مشروع القالب الصحيح. يحتوي قالب الطيار الآلي على تكوين محركات وأجهزة استشعار الطيار الآلي. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.
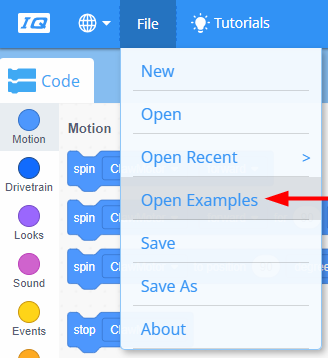
يجب على المبرمج إكمال الخطوات التالية:
- افتح قائمة الملف.
- حدد أمثلة مفتوحة.
-
استخدم شريط التصفية في الجزء العلوي من التطبيق وحدد "قوالب".
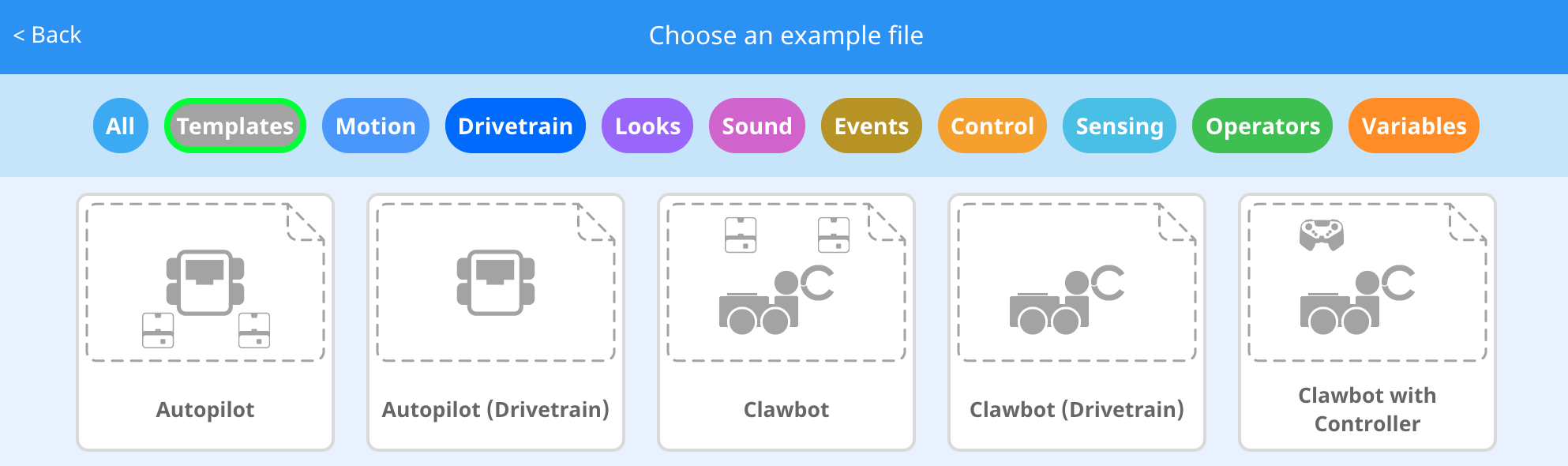
-
حدد وافتح قالب الطيار الآلي (مجموعة نقل الحركة).
- أعد تسمية مشروعك Drive Velocity لأننا سنستخدم كتلة [set drive velocity].
- احفظ مشروعك. انقر على أحد الروابط التالية لمزيد من المعلومات حول الحفظ: macOS وWindows وChromebook وiPad.

- تحقق للتأكد من أن اسم المشروع Drive Velocity موجود الآن في النافذة الموجودة في وسط شريط الأدوات.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم

- مشاريع الحفظ
أشر إلى أنه عندما فتحوا VEXcode IQ لأول مرة، تم تسمية النافذة VEXcode Project ولم يتم حفظها (المشار إليها في شريط الأدوات). VEXcode Project هو اسم المشروع الافتراضي عند فتح VEXcode IQ لأول مرة. بمجرد إعادة تسمية المشروع باسم Drive Velocity وحفظه، يتم تحديث الشاشة إلى Saved. باستخدام هذه النافذة في شريط الأدوات، من السهل التحقق من أن الطلاب يستخدمون المشروع الصحيح ويتم حفظه.
بمجرد حفظ المشروع في البداية، يحفظ VEXcode IQ تلقائيًا أي تغييرات لاحقة، كما هو موضح في الرسالة الموجودة بجوار اسم المشروع.
أخبر الطلاب أنهم مستعدون الآن لبدء مشروعهم الأول. اشرح للطلاب أنه باتباع بضع خطوات بسيطة، سيكونون قادرين على إنشاء وتشغيل مشروع سيحدد سرعة مجموعة دفع الطيار الآلي. - توقف وناقش
هذه نقطة جيدة للتوقف واطلب من مجموعات الطلاب مراجعة الخطوات التي تم إكمالها للتو عند بدء مشروع جديد في VEXcode IQ. انقر على أحد الروابط التالية (Google Doc/.docx/.pdf) للحصول على اقتراحات.