
![]() 教师工具箱
教师工具箱
-
活动大纲
本次探索将首先向学生介绍如何设置驾驶速度,然后要求他们测试如何设置转弯速度。 点击 (Google Doc/.docx/.pdf) 查看本次活动的概要。 -
学生将编写什么程序
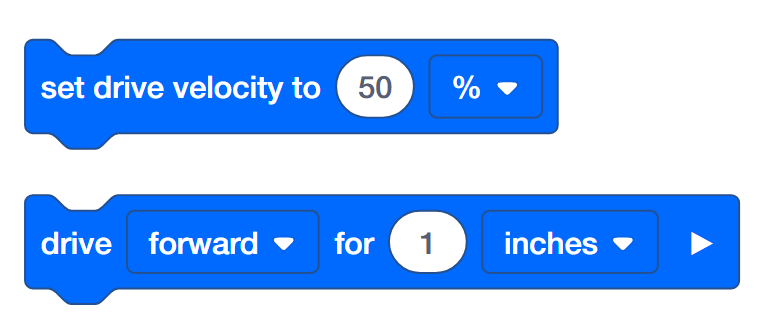
使用动力传动系统机器人配置允许学生通过向堆栈中添加 [设置驱动速度] 或 [设置转弯速度] 块来更改 [驱动] 和 [转弯] 块的速度设置。 活动的引导部分让学生使用 [设置驱动速度] 模块,活动结束时要求他们将所学知识应用到使用 [设置转弯速度] 模块。有关要求学生在“游戏”部分构建的内容的更多信息,请单击以下链接之一(Google Doc/.docx/.pdf)。
-
学生的探索角色
为帮助组织学生参与此活动,请单击以下链接之一(Google Doc/.docx/.pdf)。
![]() 教师提示
教师提示
-
如果这是学生第一次使用 VEXcode IQ,他们可以在探索过程中随时参考教程。 教程位于工具栏中。

-
单击 以下其中一个链接(Google Doc/.docx/.pdf)获取有关传动系统和驱动块如何关联的建议。
-
确保每个学生小组都有所有必要的材料。
自动驾驶仪已准备好以不同的速度行驶!
这种探索将为您提供能够开始创建项目的工具,这些项目可以以适合机器人用途的速度移动自动驾驶仪的电机。
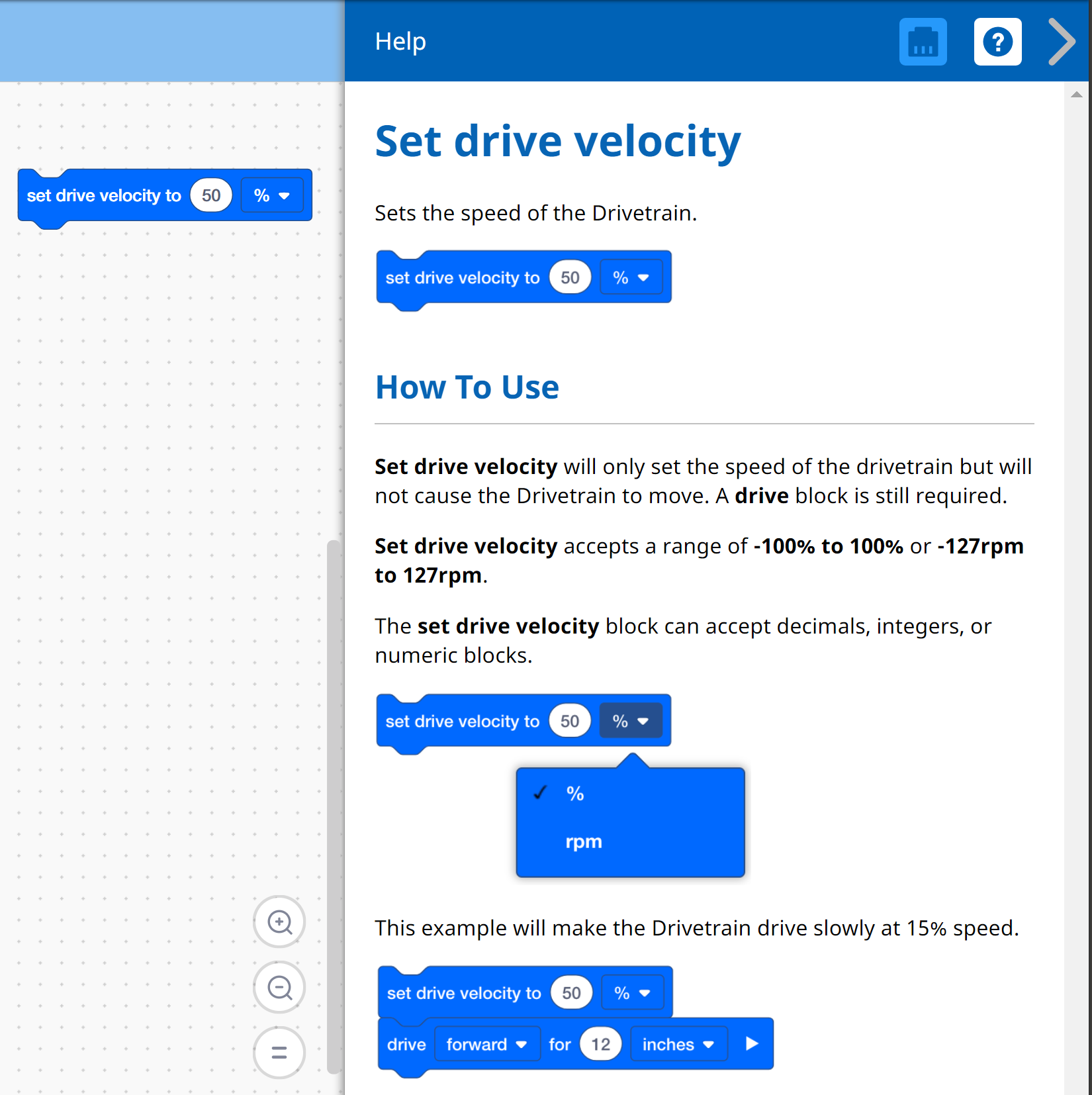
VEXcode IQ 将用于本次探索的第一部分:
要了解有关该块的更多信息,请打开“帮助”,然后选择您要阅读的块。
每个组中的建造者应该获得所需的硬件。 记录员应该拿到小组的工程笔记本。 程序员应打开 VEXcode IQ。
| 数量 | 所需材料 |
|---|---|
| 1 |
自动驾驶机器人 |
| 1 |
1x1 连接器针脚 |
| 1 |
充满电的机器人电池 |
| 1 |
VEXcode IQ |
| 1 |
USB 电缆(如果使用计算机) |
| 1 |
工程笔记本 |
第 1 步:为探索做准备
在开始活动之前,您是否已准备好以下每件物品? 建造商应检查以下各项:
第 2 步:开始一个新项目
在开始项目之前,程序员需要选择正确的模板项目。 Autopilot 模板包含 Autopilot 电机和传感器配置。 如果不使用模板,您的机器人将无法正确运行项目。
程序员应完成以下步骤:
-
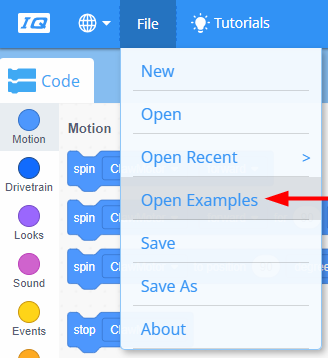
打开文件菜单。
-
选择打开 示例。
-
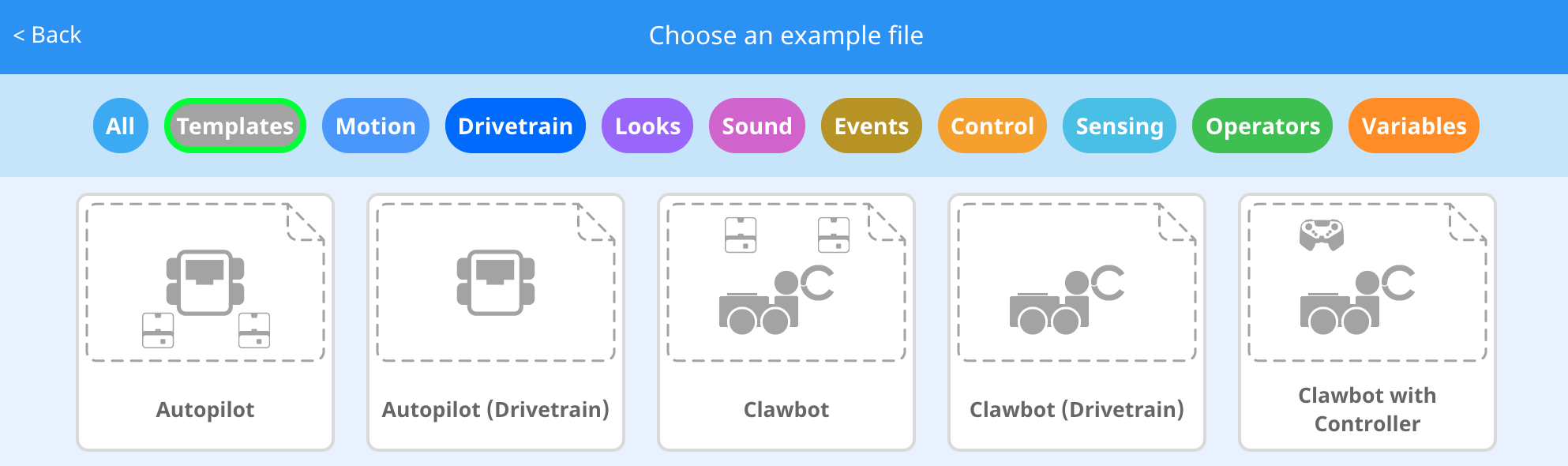
使用应用程序顶部的过滤栏并选择“模板”。
-
选择并打开 自动驾驶仪(传动系统)模板。
-
将您的项目重命名为 Drive Velocity 因为我们将使用 [设置驱动速度] 块。

-
检查确保项目名称 Drive Velocity 现在位于工具栏中心的窗口中。
![]() 教师工具箱
教师工具箱

-
保存项目
指出,当他们第一次打开 VEXcode IQ 时,窗口被标记为 VEXcode 项目 并且未保存(在工具栏上显示)。 VEXcode Project 是 VEXcode IQ 首次打开时的默认项目名称。 一旦项目重命名为 Drive Velocity 并保存,显示就会更新为“已保存”。 使用工具栏中的此窗口,可以轻松检查学生是否使用了正确的项目并保存了该项目。最初保存项目后,VEXcode IQ 会自动保存任何后续更改,如项目名称旁边的消息所示。
告诉学生他们现在已经准备好开始他们的第一个项目。 向学生解释,通过执行几个简单的步骤,他们将能够创建并运行一个项目来设置自动驾驶仪传动系统的速度。
-
停止并讨论
这是暂停的好时机,让学生小组回顾一下在 VEXcode IQ 中启动新项目时刚刚完成的步骤。 单击以下链接之一(Google Doc/.docx/.pdf) 获取建议。