
أعد مزج مشروعك
![]() نصائح للمعلم
نصائح للمعلم
يمكن للطلاب الرجوع إلى البرامج التعليمية إذا واجهوا أي مشاكل في إنشاء مشروع أو إعادة تسميته أو حفظه. تجول وراقب الطلاب للتأكد من إكمالهم لجميع الخطوات.
يجب على المبرمج إكمال الخطوات التالية:

- افتح قائمة الملف.
- حدد أمثلة مفتوحة.
- حدد وافتح قالب الطيار الآلي.
- قم بتسمية مشروعك Velocity Remix.
- احفظ مشروعك.
![]() مجموعة أدوات المعلم
-
السلوكيات
مجموعة أدوات المعلم
-
السلوكيات
كما ذكرنا سابقًا، فإن السلوكيات هي طريقة للحديث عن تصرفات الروبوت. تتمثل إحدى الطرق لجعل
الطلاب يفكرون في السلوكيات وتنظيم الإجراءات في تسلسل، في جعل الطلاب يسمون أجزاء مختلفة
من مشروعهم باستخدام كتلة [التعليق]. يمكن للطلاب تصنيف السلوكيات المختلفة من
التحديات طوال المشروع. لمزيد من المعلومات حول استخدام كتلة [التعليق]،
استخدم التعليمات.
In the Tag You 're It! التحدي، يُطلب من الطلاب
برمجة الطيار الآلي على الدوران بسرعة لتجنب وضع علامة عليه، والقيادة ببطء لوضع علامة على
شخص ما، ثم الدوران بسرعة مرة أخرى للهرب. عرض المثال أدناه
لاستخدام كتلة التعليق لوصف تسلسل السلوكيات:

يمكنك أيضًا أن تطلب من الطلاب شرح كيف سيخططون لهذه التحديات من حيث الطريقة التي يريدون ويتوقعون أن يتصرف بها الروبوت.
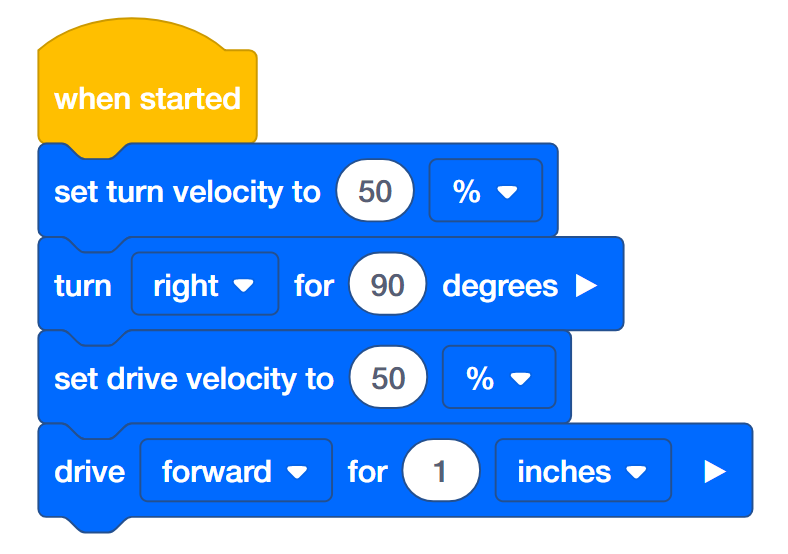
ضع علامة عليك!
استدر بسرعة، قد ببطء، استدر بسرعة للعب لعبة بطاقة!
-
الروبوت يريد أن يلعب لعبة العلامة -أنت هو! أيها المبرمج، استخدم كتل [set turn velocity] و [turn for] و [set drive velocity] و [drive for] لبرمجة الطيار الآلي على الدوران بسرعة لتجنب وضع علامات عليه، وقم بالقيادة ببطء لوضع علامة على شخص ما، ثم استدر بسرعة مرة أخرى للهرب! يجب أن تكون النسبة المئوية لسرعة الدوران أعلى بمرتين على الأقل من النسبة المئوية لسرعة القيادة. بدأ المشروع أدناه ولكنه غير مكتمل. يحتاج إلى المزيد من الكتل وتعيين السرعات.
- أيها المبرمج، احفظ مشروع العلامة وقم بتنزيله إلى الدماغ.
- المشغل، قم بتشغيل مشروع العلامة.
- هل يدور الروبوت بسرعة، ويقود ببطء، ثم يستدير بسرعة مرة أخرى ؟
- أيها المسجل، دوّن ملاحظات حول سلوك الروبوت.
تحدي المكافأة: اطلب من الطيار الآلي تشغيل صوت بمجرد وضع علامة على شخص ما!
![]() صندوق أدوات المعلم
-
التذكيرات والحلول
صندوق أدوات المعلم
-
التذكيرات والحلول
-
قم بإعداد كائن ثابت مثل كتاب يقوم الروبوت بوضع علامة عليه لتقليد وضع علامة على شخص ما.
-
يمكن للمعلم الحد من مسافات القيادة إذا كانت المساحة محدودة.
-
يجب أن يعمل الطلاب في مجموعاتهم مع أدوارهم الفردية.
-
يجب على الباني التحقق من أن الروبوت مستعد لتشغيل المشروع.
-
يجب على المبرمج إجراء التغييرات وفقًا للتوجيهات.
-
يجب أن يدير المشغل المشاريع على الروبوت.
-
يجب على المسجل توثيق عمله ونتائجه في دفاتره الهندسية.
-
اطلب من الطلاب تسجيل الوصول عند الانتهاء من هذا النشاط وإما عرض أو تشغيل مشروعهم(مشاريعهم).
للحصول على حل لـ Tag You 're It!، انقر فوق أحد الروابط التالية (Google Doc/.docx/.pdf).
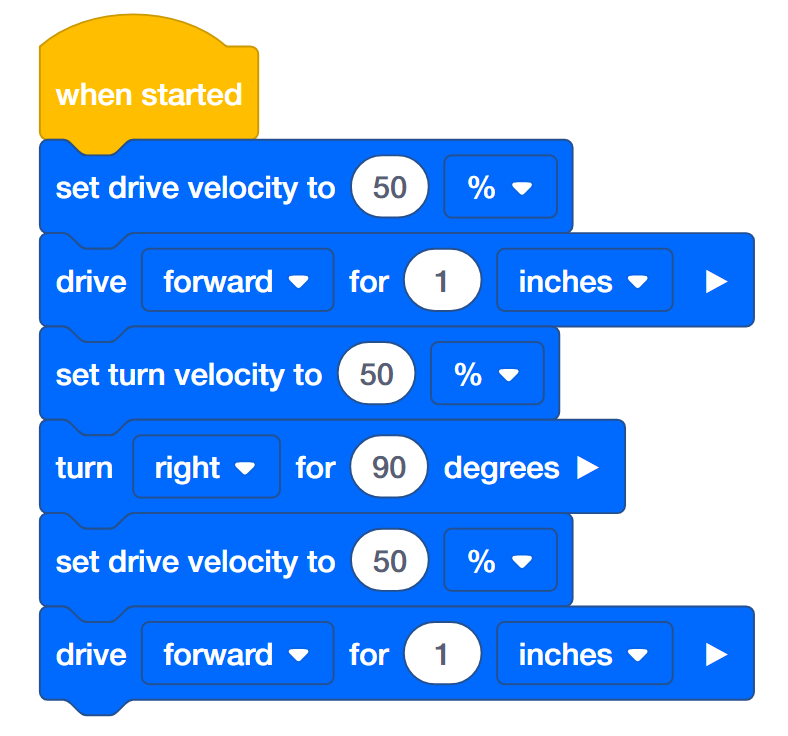
احموا القلعة!
تحرك في مربع لحماية القلعة من الدخلاء!
-
طلب منك ملكك حماية القلعة! يجب عليك القيادة حول القلعة المربعة للتأكد من أنها آمنة من الدخلاء! أيها المبرمج، استخدم ضبط سرعة الانعطاف، وقم بالدوران، واضبط سرعة القيادة، وقم بالقيادة للكتل لبرمجة الطيار الآلي للتحرك في مربع. يجب أن يقود الطيار الآلي بسرعة على طول جانبي المربع ولكن يستدير ببطء عند الزوايا. بدأ المشروع أدناه ولكنه غير مكتمل. يحتاج إلى المزيد من الكتل وتعيين السرعات.
- أيها المبرمج، احفظ مشروع القلعة وقم بتنزيله إلى الدماغ.
- المشغل، قم بتشغيل مشروع القلعة.
- هل يتحرك الروبوت بسرعة في شكل مربع ولكنه يدور ببطء عند الزوايا ؟
- أيها المسجل، دوّن ملاحظات حول سلوك الروبوت.
التحديات الإضافية:
- اطلب من شاشة LED التي تعمل باللمس للطيار الآلي أن تعرض لونًا مختلفًا أثناء قيادتها على كل جانب من جوانب المربع.
- يبلغ محيط القلعة المربعة التي تحتاج إلى حراسة 20 بوصة. برمجة الروبوت للتحرك حول المحيط.
- تبلغ مساحة القلعة المربعة التي تحتاج إلى حراسة 49 بوصة. احسب طول كل ضلع وتحرك في مربع يغطي المساحة.
![]() صندوق أدوات المعلم
-
التذكيرات والحلول
صندوق أدوات المعلم
-
التذكيرات والحلول
-
يمكن للمعلم الحد من مسافات القيادة إذا كانت المساحة محدودة.
-
يجب أن يعمل الطلاب في مجموعاتهم مع أدوارهم الفردية.
-
يجب على الباني التحقق من أن الروبوت مستعد لتشغيل المشروع.
-
يجب على المبرمج إجراء التغييرات وفقًا للتوجيهات.
-
يجب أن يدير المشغل المشاريع على الروبوت.
-
يجب على المسجل توثيق عمله ونتائجه في دفاتره الهندسية.
-
اطلب من الطلاب تسجيل الوصول عند الانتهاء من هذا النشاط وإما عرض أو تشغيل مشروعهم(مشاريعهم).
للحصول على حلول لحماية القلعة!، انقر فوق أحد الروابط التالية (Google Doc/.docx/.pdf).
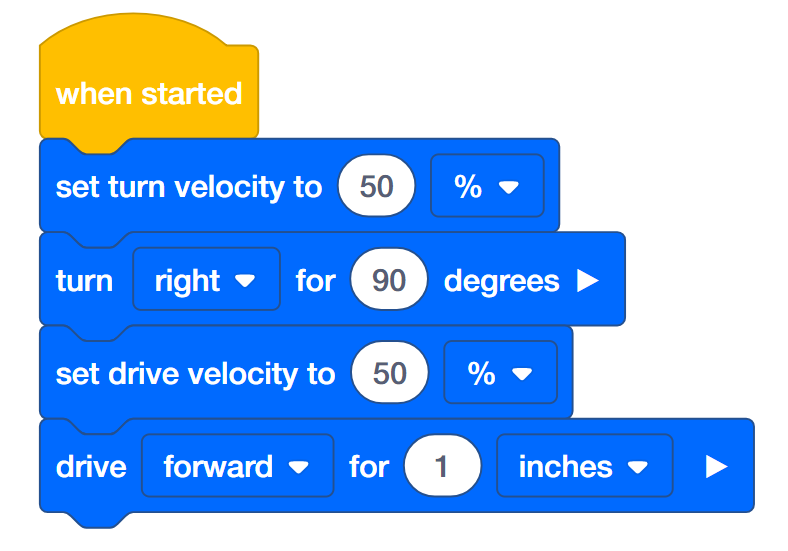
روبوت نادل
لا تسكب المشروبات!
-
يتدرب روبوتك على أن يكون نادلاً في مطعم جديد في المدينة. برمج النادل الآلي ليتمكن من التحرك بسرعة دون انسكاب ما يحمله! استخدم 6x Pitch Standoff لمحاكاة الطعام أو المشروبات التي سيحملها النادل. أيها المبرمج، استخدم سرعة الانعطاف المحددة، واستدر، واضبط سرعة القيادة، وقم بالقيادة للكتل لبرمجة الطيار الآلي على الدوران 360 درجة والقيادة 12 بوصة في أسرع وقت ممكن مع موازنة 6x Pitch Standoff على دماغ الطيار الآلي. بدأ المشروع أدناه ولكنه غير مكتمل. يحتاج إلى ضبط السرعات والمسافات.
-
Builder، ضع 6x Pitch Standoff من VEX IQ Kit عبر المكان الذي يتم فيه كتابة VEX IQ على الدماغ.

- مبرمج، اضبط السرعات والمسافات. ثم احفظ مشروع النادل الآلي وقم بتنزيله إلى الدماغ.
- المشغل، قم بتشغيل مشروع النادل الآلي.
- هل يدور الروبوت ويقود بينما يبقي العارضة فوق الدماغ ؟ ما مدى السرعة التي يمكن أن يتحرك بها الروبوت قبل أن ينزلق العارضة ؟
- أيها المبرمج، اختبر السرعات بشكل أسرع وأسرع حتى تجد الحد الأقصى. قد يكون حد الانعطاف مختلفًا عن حد القيادة. استخدم المعلومات من المسجل من أجل اتخاذ القرارات بشأن السرعة التي تعد الخيار الأفضل.
- قم بالتسجيل وتدوين الملاحظات حول سلوك الروبوت وسرعته وما إذا كان الحزمة تسقط. دوّن كيف تتغير السرعات في كل مرة يتم فيها اختبار المشروع.
![]() صندوق أدوات المعلم
- التصميم
التكراري
صندوق أدوات المعلم
- التصميم
التكراري
يركز هذا النشاط على مطالبة الطلاب بالانخراط في عملية تصميم تكرارية. يُطلب من الطلاب
اختبار مشاريعهم قبل إجراء التغييرات. شجع الطلاب على التصميم الكامل والاختبار وإجراء
التغييرات بناءً على الملاحظات والاختبار مرة أخرى. يجب أن تستند التعديلات على السرعة إلى
نتائج الاختبارات و/أو التعليقات الواردة من أعضاء المجموعة الآخرين. شجع الطلاب على اتباع
عملية التصميم التكراري بدلاً من مجرد التخمين والتحقق للتوصل إلى استنتاج بشأن السرعة
الأفضل. ستضمن أفضل سرعة أن النادل الآلي لا يسكب أي شيء. التصميم
التكراري هو منهجية تصميم مهمة في الروبوتات بالإضافة إلى عمليات التصميم الهندسي الأخرى.
سيتدرب الطلاب أيضًا على التفكير المجرد أثناء تحديد كيفية ضبط السرعة لاستنتاج أيهما أفضل.
![]() صندوق أدوات المعلم
-
التذكيرات والحلول
صندوق أدوات المعلم
-
التذكيرات والحلول
- يمكن للمعلم الحد من مسافات القيادة إذا كانت المساحة محدودة.
- يجب أن يعمل الطلاب في مجموعاتهم مع أدوارهم الفردية.
-
يجب على المنشئ التحقق من أن الروبوت مستعد لتشغيل المشروع وأن 6x Pitch Standoff موضوعة بشكل صحيح فوق ملصق VEX IQ على الدماغ قبل كل اختبار للسرعة.

- يجب على المبرمج إجراء التغييرات وفقًا للتوجيهات.
- يجب أن يدير المشغل المشاريع على الروبوت.
- يجب على المسجل توثيق عمله ونتائجه في دفاتره الهندسية.
-
اطلب من الطلاب تسجيل الوصول عند الانتهاء من هذا النشاط وإما عرض أو تشغيل
مشروعهم(مشاريعهم).
للحصول على الحل لـ Robot Waiter، انقر فوق أحد الروابط
التالية (Google
Doc/.docx/.pdf)