
![]() Mokytojo patarimai
Mokytojo patarimai
Mokiniai gali peržiūrėti vadovėlius, jei jiems kyla problemų kuriant, pervadinant ar išsaugant projektą. Vaikščiokite ir stebėkite mokinius, kad įsitikintumėte, jog jie atliko visus veiksmus.
Programuotojas turi atlikti šiuos veiksmus:

-
Atidarykite meniu Failas .
-
Pasirinkite Atidarykite Pavyzdžiai.
-
Pasirinkite ir atidarykite Autopiloto šabloną.
-
Pavadinkite savo projektą Velocity Remix.
-
Išsaugokite savo projektą.
![]() Mokytojo įrankių rinkinys
-
Elgesys
Mokytojo įrankių rinkinys
-
Elgesys
Kaip minėta anksčiau, elgesys yra būdas kalbėti apie roboto veiksmus. Vienas iš būdų paskatinti mokinius susimąstyti apie elgesį ir organizuoti veiksmus iš eilės – mokinius paženklinti įvairiomis projekto dalimis naudojant [komentaras] bloką. Mokiniai gali pažymėti skirtingą elgesį nuo iššūkių viso projekto metu. Norėdami gauti daugiau informacijos apie bloko [komentaras] naudojimą, naudokite Pagalba.
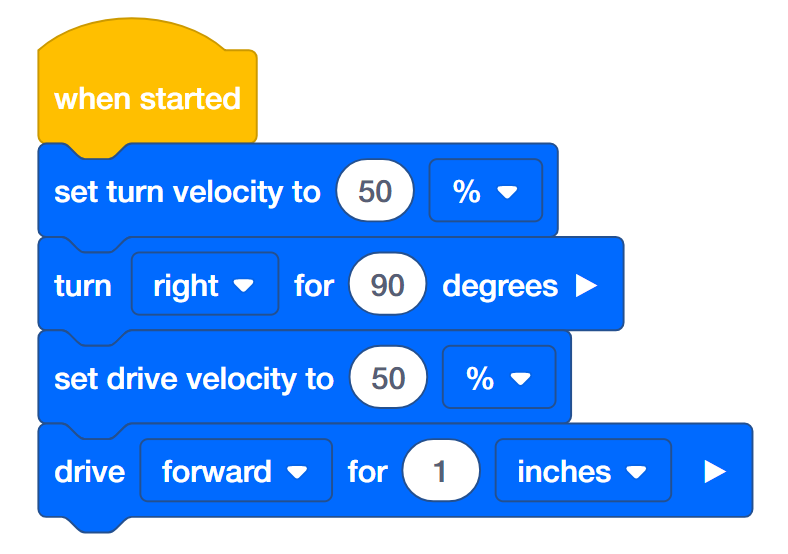
Žymėje tu esi! Iššūkį, mokinių prašoma užprogramuoti Autopilotą, kad jis greitai suktųsi, kad nebūtų pažymėtas, važiuotų lėtai, kad ką nors pažymėtų, o tada vėl greitai suktųsi, kad pabėgtų. Peržiūrėkite toliau pateiktą pavyzdį, kaip naudoti bloką komentaras , kad apibūdintumėte veiksmų seką:

Taip pat galite paprašyti mokinių paaiškinti, kaip jie planuos šiuos iššūkius, kaip jie nori ir tikisi, kad robotas elgsis.
Pažymėkite, tu esi!
Greitai pasukite, lėtai važiuokite, greitai pasukite, kad žaistumėte žymų žaidimą!
-
Robotas nori žaisti žymėjimo žaidimą – tu! Programuotojau, naudokite blokus [nustatyti posūkio greitį], [turn for], [set drive speed] ir [drive for], kad užprogramuotumėte Autopilotą greitai suktis, kad išvengtumėte žymėjimo, važiuokite lėtai, kad ką nors pažymėtumėte, ir vėl greitai pasukite. pabėgti! Posūkio greičio procentas turi būti bent du kartus didesnis nei važiavimo greičio procentas. Žemiau pateiktas projektas pradėtas, bet nebaigtas. Tam reikia daugiau blokų ir nustatytų greičių.
-
Programuotojau, išsaugokite projektą Tag ir atsisiųskite jį į smegenis.
-
Operatorius, vykdykite Pažymėkite projektą.
-
Ar robotas greitai sukasi, lėtai važiuoja ir vėl greitai sukasi?
-
Diktofonas, užsirašykite apie roboto elgesį.
Papildomas iššūkis: Leiskite Autopilotui leisti garsą, kai tik ką nors pažymi!
![]() Mokytojo įrankių rinkinys
-
Priminimai ir sprendimai
Mokytojo įrankių rinkinys
-
Priminimai ir sprendimai
-
Nustatykite nejudantį objektą, pvz., knygą, kurią robotas pažymės, kad imituotų žmogaus žymėjimą.
-
Mokytojas gali apriboti važiavimo atstumus, jei vietos yra ribotos.
-
Mokiniai turėtų dirbti savo grupėse su savo individualiais vaidmenimis.
-
Statytojas turėtų patikrinti, ar robotas yra pasirengęs vykdyti projektą.
-
Programuotojas turėtų atlikti pakeitimus, kaip nurodyta.
-
Operatorius turėtų vykdyti projektus robote.
-
Registruotojas turėtų dokumentuoti savo darbą ir rezultatus savo inžinerijos sąsiuviniuose.
-
Paprašykite mokinių užsiregistruoti, kai jie baigia šią veiklą, ir parodyti arba vykdyti savo projektą (-us).
Norėdami rasti sprendimą, kaip pažymėti tu esi!, spustelėkite vieną iš šių nuorodų (Google Doc/.docx/.pdf).
Saugokite pilį!
Judėkite aikštėje, kad apsaugotumėte pilį nuo įsibrovėlių!
-
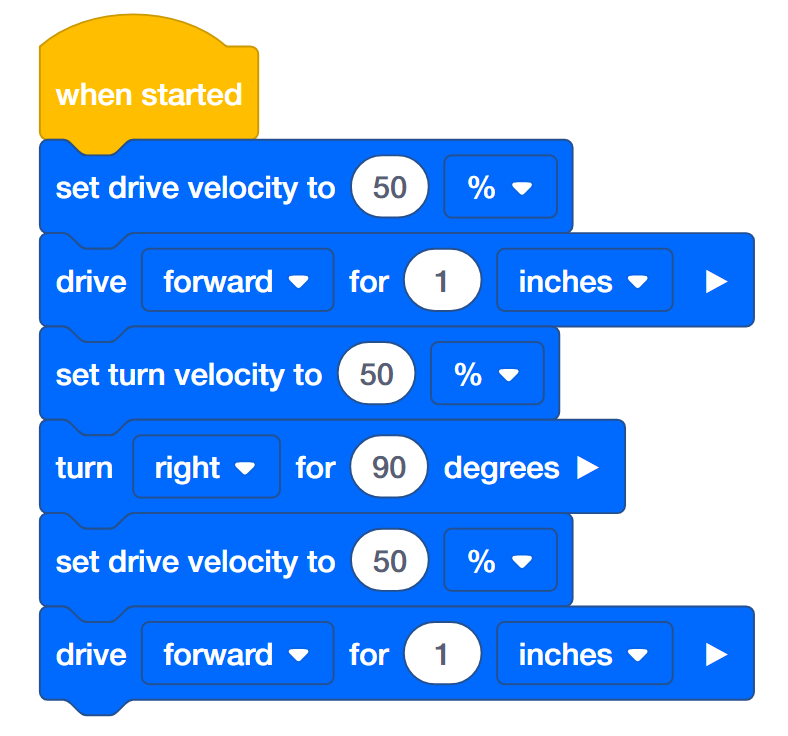
Jūsų karalius paprašė apsaugoti pilį! Turite važiuoti aplink kvadratinę pilį, kad įsitikintumėte, jog ji yra saugi nuo įsibrovėlių! Programuotojau, naudokite nustatytą sukimosi greitį, apsisukimą, važiavimo greitį ir pavarą blokams, kad užprogramuotumėte Autopilotą judėti kvadratu. Autopilotas turėtų greitai važiuoti aikštės kraštais, bet lėtai suktis kampuose. Žemiau pateiktas projektas pradėtas, bet nebaigtas. Tam reikia daugiau blokų ir nustatytų greičių.
-
Programuotojau, išsaugokite pilies projektą ir atsisiųskite jį į smegenis.
-
Operatorius, vykdyk Pilies projektą.
-
Ar robotas greitai juda kvadrato forma, bet lėtai sukasi kampuose?
-
Diktofonas, užsirašykite apie roboto elgesį.
Papildomi iššūkiai:
-
Kad Autopiloto jutiklinis LED ekranas būtų skirtingos spalvos, kai jis važiuoja abiejose aikštės pusėse.
-
Kvadratinės pilies, kurią reikia saugoti, perimetras yra 20 colių. Užprogramuokite robotą judėti aplink perimetrą.
-
Kvadratinės pilies plotas, kurį reikia saugoti, yra 49 coliai. Apskaičiuokite kiekvienos kraštinės ilgį ir judėkite kvadratu, kuris apima plotą.
![]() Mokytojo įrankių rinkinys
-
Priminimai ir sprendimai
Mokytojo įrankių rinkinys
-
Priminimai ir sprendimai
-
Mokytojas gali apriboti važiavimo atstumus, jei vietos yra ribotos.
-
Mokiniai turėtų dirbti savo grupėse su savo individualiais vaidmenimis.
-
Statytojas turėtų patikrinti, ar robotas yra pasirengęs vykdyti projektą.
-
Programuotojas turėtų atlikti pakeitimus, kaip nurodyta.
-
Operatorius turėtų vykdyti projektus robote.
-
Registruotojas turėtų dokumentuoti savo darbą ir rezultatus savo inžinerijos sąsiuviniuose.
-
Paprašykite mokinių užsiregistruoti, kai jie baigia šią veiklą, ir parodyti arba vykdyti savo projektą (-us).
Norėdami rasti sprendimus, kaip apsaugoti pilį!, spustelėkite vieną iš šių nuorodų (Google Doc/.docx/.pdf).
Robotas padavėjas
Neišpilkite gėrimų!
-
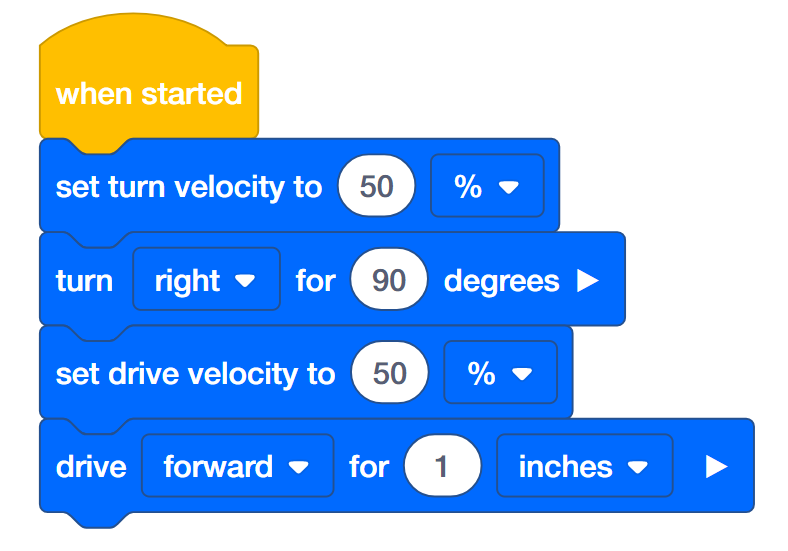
Jūsų robotas mokosi būti padavėju naujame miesto restorane. Užprogramuokite padavėją robotą taip, kad jis galėtų greitai judėti neišpildamas to, ką neša! Naudokite 6x Pitch Standoff, kad imituotumėte maistą ar gėrimus, kuriuos neštų padavėjas. Programuotojau, naudokite nustatytą sukimosi greitį, apsisukimą, važiavimo greitį ir pavarą blokams, kad užprogramuotumėte Autopilotą apsisukti 360 laipsnių ir važiuoti 12 colių kuo greičiau, kartu subalansuodami 6x Pitch Standoff Autopiloto smegenyse. . Žemiau pateiktas projektas pradėtas, bet nebaigtas. Turi būti nustatyti greičiai ir atstumai.
-
„Builder“, iš VEX IQ rinkinio padėkite 6x žingsnio atstumą toje vietoje, kur VEX IQ parašyta ant smegenų.

-
Programuotojas, nustatykite greičius ir atstumus. Tada išsaugokite Robot Waiter projektą ir atsisiųskite jį į smegenis.
-
Operatorius, vykdykite Robot Waiter projektą.
-
Ar robotas sukasi ir važiuoja, laikydamas spindulį ant smegenų? Kaip greitai robotas gali judėti, kol spindulys nuslysta?
-
Programuotojau, išbandykite vis greitesnius greičius, kol rasite ribą. Apsisukimo riba gali skirtis nuo važiavimo ribos. Naudokite įrašymo įrenginio informaciją, kad nuspręstumėte, kuris greitis yra geriausias pasirinkimas.
-
Diktofonas, užsirašykite apie roboto elgesį, jo greitį ir tai, ar spindulys nukrenta. Atkreipkite dėmesį į tai, kaip greičiai keičiasi kiekvieną kartą, kai išbandomas projektas.
![]() Mokytojo įrankių rinkinys
-
Iteratyvus dizainas
Mokytojo įrankių rinkinys
-
Iteratyvus dizainas
Šioje veikloje pagrindinis dėmesys skiriamas studentų prašymui įsitraukti į kartotinį projektavimo procesą. Studentų prašoma išbandyti savo projektus prieš atliekant pakeitimus. Skatinkite mokinius visapusiškai kurti, išbandyti, atlikti pakeitimus remiantis atsiliepimais ir išbandyti dar kartą. Greičio koregavimas turėtų būti pagrįstas testų rezultatais ir (arba) kitų grupės narių atsiliepimais. Skatinkite mokinius sekti kartotinį projektavimo procesą, o ne tik spėlioti ir tikrinti, kad padarytų išvadą, koks greitis yra geriausias. Geriausias greitis užtikrins, kad padavėjas robotas nieko neišpiltų.
Iteratyvus projektavimas yra svarbi projektavimo metodika robotikoje ir kituose inžinerinio projektavimo procesuose.
Studentai taip pat praktikuos abstrakčius samprotavimus, spręsdami, kaip reguliuoti greitį, kad nuspręstų, kuris iš jų yra geriausias.
![]() Mokytojo įrankių rinkinys
-
Priminimai ir sprendimai
Mokytojo įrankių rinkinys
-
Priminimai ir sprendimai
-
Mokytojas gali apriboti važiavimo atstumus, jei vietos yra ribotos.
-
Mokiniai turėtų dirbti savo grupėse su savo individualiais vaidmenimis.
-
Prieš kiekvieną greičio testą statytojas turėtų patikrinti, ar robotas yra pasirengęs vykdyti projektą ir ar 6x Pitch Standoff tinkamai uždėtas ant smegenų VEX IQ lipduko.

-
Programuotojas turėtų atlikti pakeitimus, kaip nurodyta.
-
Operatorius turėtų vykdyti projektus robote.
-
Registruotojas turėtų dokumentuoti savo darbą ir rezultatus savo inžinerijos sąsiuviniuose.
-
Paprašykite mokinių užsiregistruoti, kai jie baigia šią veiklą, ir parodyti arba vykdyti savo projektą (-us).
Norėdami rasti sprendimą dėl Robot Waiter, spustelėkite vieną iš šių nuorodų (Google Doc/.docx/.pdf)