
![]() Skolotāju padomi
Skolotāju padomi
Studenti var atsaukties uz apmācībām, ja viņiem ir problēmas ar projekta izveidi, pārdēvēšanu vai saglabāšanu. Staigājiet apkārt un novērojiet studentus, lai pārliecinātos, ka viņi veic visas darbības.
Programmētājam jāveic šādas darbības:

-
Atveriet izvēlni Fails .
-
Izvēlieties Atveriet Piemēri.
-
Atlasiet un atveriet Autopilota veidni.
-
Nosauciet savu projektu Velocity Remix.
-
Saglabājiet savu projektu.
![]() Skolotāju rīkkopa
-
uzvedība
Skolotāju rīkkopa
-
uzvedība
Kā minēts iepriekš, uzvedība ir veids, kā runāt par robota darbībām. Viens no veidiem, kā likt studentiem domāt par uzvedību un organizēt darbības pēc kārtas, ir likt skolēniem marķēt dažādas sava projekta daļas, izmantojot bloku [komentārs] . Studenti var iezīmēt dažādu uzvedību no izaicinājumiem visa projekta laikā. Lai iegūtu papildinformāciju par bloka [komentārs] izmantošanu, izmantojiet Palīdzība.
Tagā Tu esi tas! izaicinājums, skolēniem tiek lūgts ieprogrammēt Autopilotu, lai tas ātri pagrieztos, lai netiktu atzīmēti, braukt lēnām, lai atzīmētu kādu, un pēc tam ātri pagriezties vēlreiz, lai aizbēgtu. Skatiet tālāk redzamo piemēru par komentāru bloka izmantošanu, lai aprakstītu darbību secību.

Varat arī lūgt studentiem paskaidrot, kā viņi plānos šos izaicinājumus, ņemot vērā to, kā viņi vēlas un sagaida robota uzvedību.
Atzīmē, ka Tu esi tas!
Pagriezieties ātri, brauciet lēni, pagriezieties ātri, lai spēlētu tagu spēli!
-
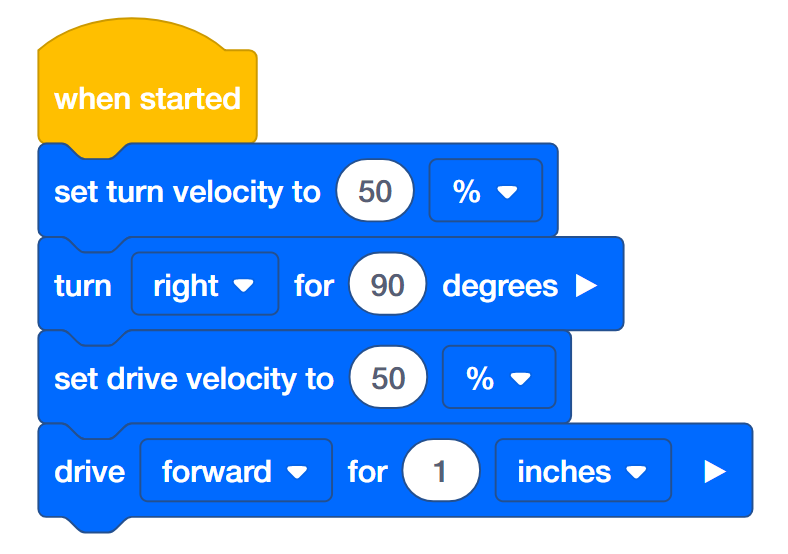
Robots vēlas uzspēlēt tagu spēli — tu esi tas! Programmētājs, izmantojiet blokus [iestatīt pagrieziena ātrumu], [turn for], [set drive speed] un [drive for], lai ieprogrammētu Autopilotu ātri pagriezties, lai netiktu atzīmēts, brauciet lēnām, lai atzīmētu kādu, un pēc tam atkal ātri pagriezieties. aizbēgt! Ātruma procentam pagriezienam jābūt vismaz divreiz lielākam par braukšanas ātruma procentuālo daļu. Tālāk minētais projekts ir uzsākts, bet nav pabeigts. Tam ir vajadzīgi vairāk bloku un iestatīti ātrumi.
-
Programmētājs, saglabājiet projektu Tag un lejupielādējiet to smadzenēs.
-
Operators, izpildiet Atzīmējiet projektu.
-
Vai robots ātri griežas, brauc lēni un pēc tam atkal ātri pagriežas?
-
Ierakstītājs, pieraksti par robota uzvedību.
Bonusa izaicinājums: Lieciet Autopilotam atskaņot skaņu, tiklīdz tas kādu atzīmē!
![]() Skolotāju rīkkopa
-
Atgādinājumi un risinājumi
Skolotāju rīkkopa
-
Atgādinājumi un risinājumi
-
Iestatiet stacionāru objektu, piemēram, grāmatu, kuru robots atzīmēs, lai atdarinātu personas atzīmēšanu.
-
Ja vieta ir ierobežota, skolotājs var ierobežot braukšanas attālumus.
-
Studentiem jāstrādā savās grupās ar savām individuālajām lomām.
-
Būvniekam ir jāpārbauda, vai robots ir sagatavots projekta īstenošanai.
-
Programmētājam jāveic izmaiņas, kā norādīts.
-
Operatoram vajadzētu vadīt projektus robotā.
-
Ierakstītājam ir jādokumentē savs darbs un rezultāti savās inženiertehniskajās piezīmju grāmatiņās.
-
Lūdziet studentus reģistrēties, kad viņi ir pabeiguši šo aktivitāti, un parādīt vai palaist savu projektu(-s).
Lai atrastu risinājumu Tag You're It!, noklikšķiniet uz vienā no šīm saitēm (Google Doc/.docx/.pdf).
Sargiet pili!
Pārvietojieties laukumā, lai pasargātu pili no iebrucējiem!
-
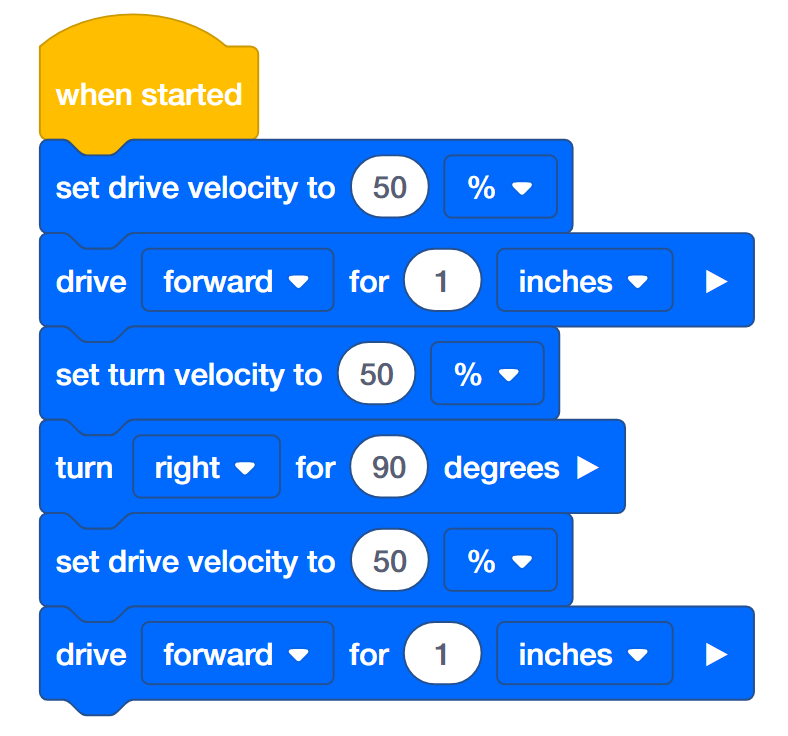
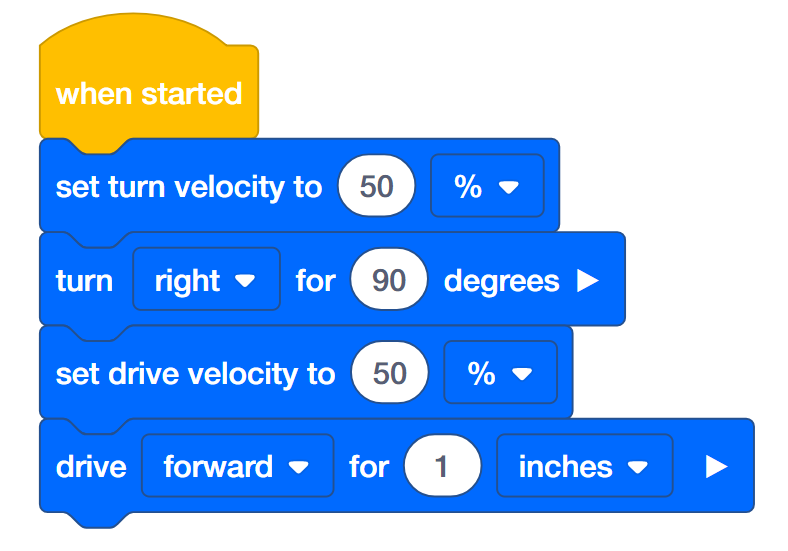
Jūsu karalis lūdza jūs aizsargāt pili! Jums jābrauc apkārt kvadrātveida pilij, lai pārliecinātos, ka tā ir droša no iebrucējiem! Programmētājs, izmantojiet iestatīto pagrieziena ātrumu, apgriezienu, iestatīto braukšanas ātrumu un piedziņu blokiem, lai ieprogrammētu Autopilotu kustībai kvadrātā. Autopilotam ātri jābrauc gar laukuma malām, bet lēnām jāgriežas stūros. Tālāk minētais projekts ir uzsākts, bet nav pabeigts. Tam ir vajadzīgi vairāk bloku un iestatīti ātrumi.
-
Programmētājs, saglabājiet pils projektu un lejupielādējiet to smadzenēs.
-
Operators, palaist pils projektu.
-
Vai robots ātri pārvietojas kvadrātveida formā, bet lēni griežas stūros?
-
Ierakstītājs, pieraksti par robota uzvedību.
Bonusa izaicinājumi:
-
Autopilota pieskāriena LED displejs ir citā krāsā, kamēr tas darbojas katrā laukuma pusē.
-
Apsargājamās kvadrātveida pils perimetrs ir 20 collas. Ieprogrammējiet robotu, lai tas pārvietotos pa perimetru.
-
Apsargājamā kvadrātveida pils platība ir 49 collas. Aprēķiniet katras malas garumu un pārvietojieties kvadrātā, kas aptver laukumu.
![]() Skolotāju rīkkopa
-
Atgādinājumi un risinājumi
Skolotāju rīkkopa
-
Atgādinājumi un risinājumi
-
Ja vieta ir ierobežota, skolotājs var ierobežot braukšanas attālumus.
-
Studentiem jāstrādā savās grupās ar savām individuālajām lomām.
-
Būvniekam ir jāpārbauda, vai robots ir sagatavots projekta īstenošanai.
-
Programmētājam jāveic izmaiņas, kā norādīts.
-
Operatoram vajadzētu vadīt projektus robotā.
-
Ierakstītājam ir jādokumentē savs darbs un rezultāti savās inženiertehniskajās piezīmju grāmatiņās.
-
Lūdziet studentus reģistrēties, kad viņi ir pabeiguši šo aktivitāti, un parādīt vai palaist savu projektu(-s).
Lai iegūtu risinājumus, lai aizsargātu pili!, noklikšķiniet uz vienas no šīm saitēm (Google Doc/.docx/.pdf).
Robots Viesmīlis
Neizlejiet dzērienus!
-
Jūsu robots mācās par viesmīli jaunā pilsētas restorānā. Ieprogrammējiet viesmīļa robotu, lai tas varētu ātri pārvietoties, neizšļakstīt to, ko tas nes! Izmantojiet 6x Pitch Standoff, lai imitētu ēdienu vai dzērienus, ko viesmīlis nesīs. Programmētājs, izmantojiet iestatīto pagrieziena ātrumu, pagriezienu, iestatīto piedziņas ātrumu un piedziņu blokiem, lai programmētu Autopilotu pagriezties par 360 grādiem un braukt par 12 collām pēc iespējas ātrāk, vienlaikus līdzsvarojot 6x Pitch Standoff uz Autopilota smadzenēm. . Tālāk minētais projekts ir uzsākts, bet nav pabeigts. Tam jābūt iestatītam ātrumam un attālumam.
-
Builder, novietojiet VEX IQ komplekta 6 reižu attālumu vietā, kur smadzenēs ir rakstīts VEX IQ.

-
Programmētājs, iestatiet ātrumus un attālumus. Pēc tam saglabājiet projektu Robot Waiter un lejupielādējiet to smadzenēs.
-
Operators, izpildiet Robot Waiter projektu.
-
Vai robots griežas un brauc, turot staru virs smadzenēm? Cik ātri robots var pārvietoties, pirms stars noslīd?
-
Programmētājs, pārbaudiet ātrākus un ātrākus ātrumus, līdz atrodat robežu. Pagrieziena ierobežojums var atšķirties no braukšanas ierobežojuma. Izmantojiet ierakstītāja informāciju, lai pieņemtu lēmumus par to, kurš ātrums ir labākā izvēle.
-
Ierakstītājs, pierakstiet robota uzvedību, ātrumu un to, vai stars nokrīt. Ņemiet vērā, kā ātrums mainās katru reizi, kad projekts tiek pārbaudīts.
![]() Skolotāju rīkkopa
dizains
Skolotāju rīkkopa
dizains
Šīs aktivitātes mērķis ir aicināt studentus iesaistīties iteratīvā projektēšanas procesā. Pirms izmaiņu veikšanas studenti tiek aicināti pārbaudīt savus projektus. Mudiniet studentus pilnībā izstrādāt, pārbaudīt, veikt izmaiņas, pamatojoties uz atsauksmēm, un vēlreiz pārbaudīt. Ātruma korekcijām jābalstās uz pārbaužu rezultātiem un/vai atgriezenisko saiti no citiem grupas dalībniekiem. Mudiniet studentus sekot iteratīvajam projektēšanas procesam, nevis tikai minēt un pārbaudīt, lai nonāktu pie secinājuma, kurš ātrums ir labākais. Labākais ātrums nodrošinās, ka viesmīlis robots neko neizšļakstīs.
Iteratīvā projektēšana ir svarīga projektēšanas metodika robotikā, kā arī citos inženierprojektēšanas procesos.
Studenti arī praktizēs abstraktu argumentāciju, vienlaikus izlemjot, kā pielāgot ātrumu, lai secinātu, kurš no tiem ir labākais.
![]() Skolotāju rīkkopa
-
Atgādinājumi un risinājumi
Skolotāju rīkkopa
-
Atgādinājumi un risinājumi
-
Ja vieta ir ierobežota, skolotājs var ierobežot braukšanas attālumus.
-
Studentiem jāstrādā savās grupās ar savām individuālajām lomām.
-
Pirms katras ātruma pārbaudes būvniekam ir jāpārbauda, vai robots ir sagatavots projekta īstenošanai un vai 6x Pitch Standoff ir pareizi novietots virs VEX IQ uzlīmes uz smadzenēm.

-
Programmētājam jāveic izmaiņas, kā norādīts.
-
Operatoram vajadzētu vadīt projektus robotā.
-
Ierakstītājam ir jādokumentē savs darbs un rezultāti savās inženiertehniskajās piezīmju grāmatiņās.
-
Lūdziet studentus reģistrēties, kad viņi ir pabeiguši šo aktivitāti, un parādīt vai palaist savu projektu(-s).
Lai iegūtu risinājumu Robot Waiter, noklikšķiniet uz vienas no šīm saitēm (Google Doc/.docx/.pdf)