
![]() Tanári tippek
Tanári tippek
A tanulók az oktatóanyagokra hivatkozhatnak, ha problémáik vannak egy projekt létrehozása, átnevezése vagy mentése során. Sétáljon körbe, és figyelje a tanulókat, hogy megbizonyosodjon arról, hogy minden lépést teljesítenek.
A programozónak a következő lépéseket kell végrehajtania:

-
Nyissa meg a Fájl menüt.
-
Válassza Nyissa meg a Példáklehetőséget.
-
Válassza ki és nyissa meg a Autopilot Templateelemet.
-
A projekt neve Velocity Remix.
-
Mentse el projektjét.
![]() Tanári eszköztár
-
Viselkedések
Tanári eszköztár
-
Viselkedések
Mint korábban említettük, a viselkedések egy módja annak, hogy beszéljünk a robot cselekedeteiről. Az egyik módja annak, hogy a tanulók elgondolkodjanak a viselkedésekről és a cselekvések sorrendjének megszervezéséről, az, hogy a projekt különböző részeit a [megjegyzés] blokk segítségével jelölik meg. A tanulók a projekt során megjelölhetik a kihívások különböző viselkedéseit. A [megjegyzés] blokk használatával kapcsolatos további információkért használja a Súgó.
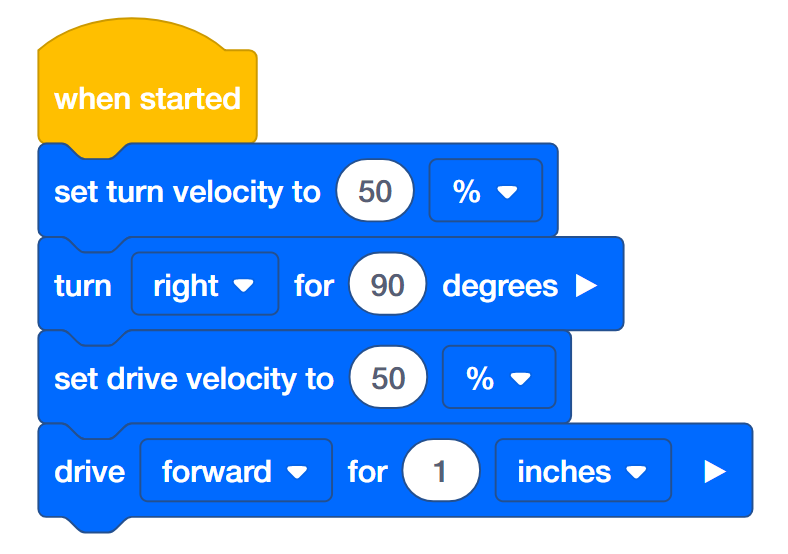
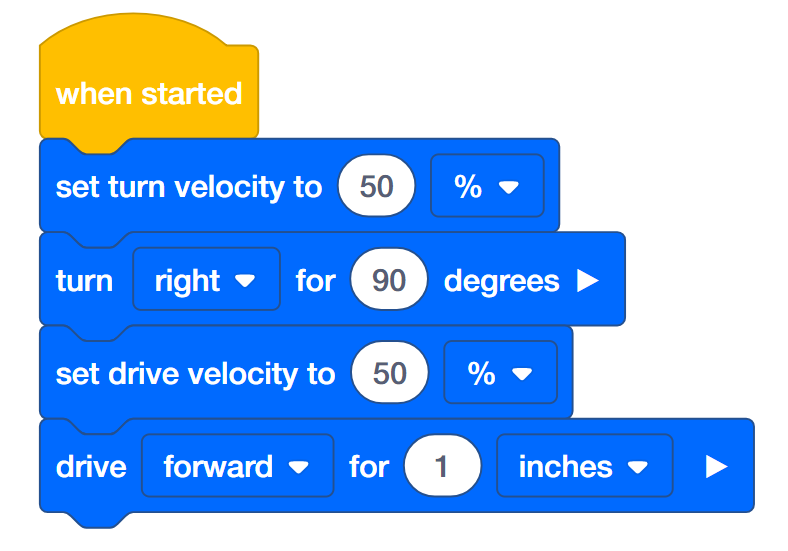
A címkében Te vagy! kihívás esetén a diákokat arra kérik, hogy programozzák be az Autopilotot, hogy gyorsan forduljon, hogy elkerülje a címkézést, lassan vezessen, hogy megjelöljön valakit, majd gyorsan forduljon újra, hogy elfusson. Tekintse meg az alábbi példát a megjegyzés blokk használatára a viselkedések sorrendjének leírására:

Arra is kérheti a tanulókat, hogy magyarázzák el, hogyan tervezik meg ezeket a kihívásokat abból a szempontból, hogy hogyan akarják és hogyan várják el a robot viselkedését.
Tag Te vagy az!
Forduljon gyorsan, vezessen lassan, forduljon gyorsan, és játsszon egy címkézést!
-
A robot cédulajátékot akar játszani – te vagy az! Programozó, használja a [set turn speed], [turn for], [set drive speed] és [drive for] blokkokat, hogy programozza az Autopilotot úgy, hogy gyorsan forduljon, hogy elkerülje a címkézést, vezessen lassan, hogy megjelöljön valakit, majd gyorsan forduljon újra. elfutni! A kanyarodási sebesség százalékának legalább kétszer olyannak kell lennie, mint a vezetési sebesség százalékos arányának. Az alábbi projekt elkezdődött, de még nem fejeződött be. Több blokkra és beállított sebességre van szüksége.
-
Programozó, mentse el a Tag projektet és töltse le az agyba.
-
Kezelő, futtatás a Címke projekt.
-
A robot gyorsan fordul, lassan halad, majd ismét gyorsan fordul?
-
Felvevő, jegyzeteljen a robot viselkedéséről.
Bónusz Kihívás: Az Autopilot adjon hangot, ha valakit megcímkéz!
![]() Tanári eszköztár
-
Emlékeztetők és megoldások
Tanári eszköztár
-
Emlékeztetők és megoldások
-
Állítson fel egy álló objektumot, például egy könyvet, amelyet a robot megcímkéz, hogy utánozza egy személy címkézését.
-
A tanár korlátozhatja a távolságot, ha a hely korlátozott.
-
A tanulóknak csoportjaikban kell dolgozniuk egyéni szerepükkel.
-
Az Építőnek ellenőriznie kell, hogy a robot felkészült-e a projekt futtatására.
-
A programozónak el kell végeznie a változtatásokat az utasításoknak megfelelően.
-
Az operátornak kell futtatnia a projekteket a roboton.
-
A felvevőnek dokumentálnia kell munkájukat és eredményeiket a mérnöki jegyzetfüzetükben.
-
Kérje meg a tanulókat, hogy jelentkezzenek be, amikor befejezték ezt a tevékenységet, és jelenítsék meg vagy futtassák projektje(ke)t.
A Tag You're It! megoldásához kattintson az alábbi hivatkozások egyikére (Google Doc/.docx/.pdf).
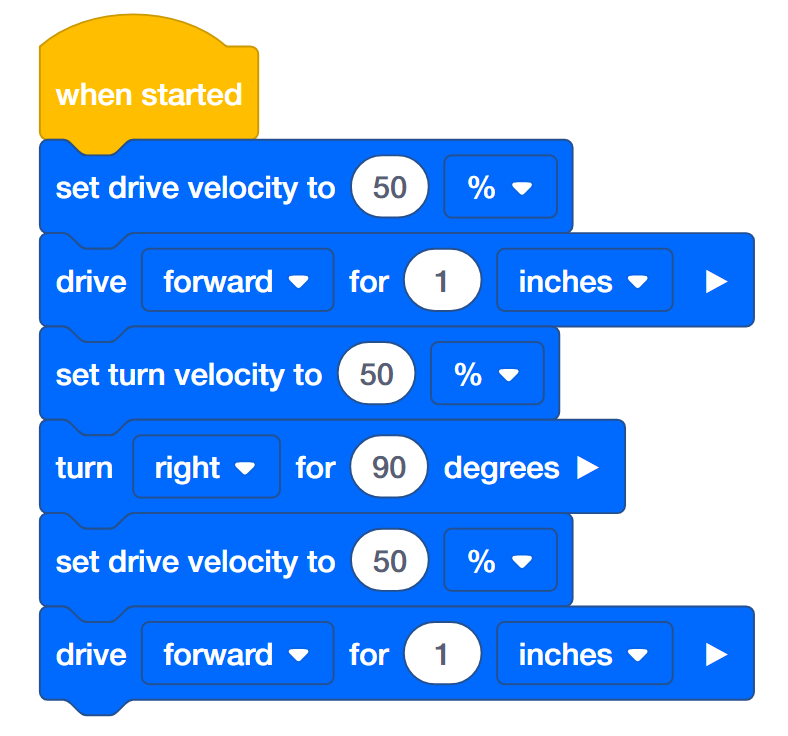
Védd a kastélyt!
Mozogj egy téren, hogy megvédd a kastélyt a betolakodóktól!
-
A királyod megkért, hogy védd meg a kastélyt! Körbe kell hajtanod a négyszögletes kastélyt, hogy megbizonyosodj arról, hogy biztonságban van a betolakodóktól! Programozó, használja a beállított fordulási sebességet, fordulatot, beállított sebességet és meghajtást blokkhoz, hogy programozza az Autopilotot, hogy egy négyzetben mozogjon. Az Autopilotnak gyorsan kell haladnia a tér oldalain, de lassan fordulnia kell a kanyarokban. Az alábbi projekt elkezdődött, de még nem fejeződött be. Több blokkra és beállított sebességre van szüksége.
-
Programozó, mentse el a Castle projektet és töltse le az agyba.
-
Üzemeltető, futás Vár projekt.
-
A robot gyorsan mozog négyzet alakban, de lassan forog a sarkokban?
-
Felvevő, jegyzeteljen a robot viselkedéséről.
Bónusz kihívások:
-
Legyen az Autopilot Touch LED-je más színben, miközben a négyzet mindkét oldalán halad.
-
Az őrzendő négyzet alakú kastély kerülete 20 hüvelyk. Programozza be a robotot a kerület körüli mozgásra.
-
A négyszögletes vár őrzendő területe 49 hüvelyk. Számítsa ki mindkét oldal hosszát, és mozogjon egy négyzetben, amely lefedi a területet.
![]() Tanári eszköztár
-
Emlékeztetők és megoldások
Tanári eszköztár
-
Emlékeztetők és megoldások
-
A tanár korlátozhatja a távolságot, ha a hely korlátozott.
-
A tanulóknak csoportjaikban kell dolgozniuk egyéni szerepükkel.
-
Az Építőnek ellenőriznie kell, hogy a robot felkészült-e a projekt futtatására.
-
A programozónak el kell végeznie a változtatásokat az utasításoknak megfelelően.
-
Az operátornak kell futtatnia a projekteket a roboton.
-
A felvevőnek dokumentálnia kell munkájukat és eredményeiket a mérnöki jegyzetfüzetükben.
-
Kérje meg a tanulókat, hogy jelentkezzenek be, amikor befejezték ezt a tevékenységet, és jelenítsék meg vagy futtassák projektje(ke)t.
A Védd meg a kastélyt! megoldásokért kattintson az alábbi hivatkozások egyikére (Google Doc/.docx/.pdf).
Robot Pincér
Ne öntsd ki az italokat!
-
A robotod pincérnek készül a város új éttermében. Programozza be úgy a robotpincért, hogy gyorsan tudjon mozogni anélkül, hogy kiborítaná, amit cipel! A 6x Pitch Standoff segítségével szimulálja azokat az ételeket vagy italokat, amelyeket a pincér hordna. Programozó, használja a beállított fordulási sebességet, fordulatot, beállított hajtási sebességet és meghajtást blokkhoz, hogy beprogramozza az Autopilotot 360 fokos elfordulásra és 12 hüvelyk meghajtására a lehető leggyorsabban, miközben egyensúlyba hozza a 6x Pitch Standoffot az Autopilot agyán. . Az alábbi projekt elkezdődött, de még nem fejeződött be. Be kell állítani a sebességeket és a távolságokat.
-
Builder, helyezze el a VEX IQ Kit 6x Pitch Standoff-ját ott, ahol a VEX IQ az agyra van írva.

-
Programozó, állítsa be a sebességeket és a távolságokat. Ezután mentse el a Robot Waiter projektet, és töltse le az agyba.
-
Kezelő, futtassa a Robot Waiter projektet.
-
A robot forog és hajt, miközben a sugarat az agy tetején tartja? Milyen gyorsan tud mozogni a robot, mielőtt a sugár lecsúszik?
-
Programozó, tesztelje a gyorsabb és gyorsabb sebességeket, amíg meg nem találja a határt. A kanyarodás határértéke eltérhet a vezetés határától. Használja a felvevőtől származó információkat annak eldöntésére, hogy melyik sebesség a legjobb választás.
-
Rögzítő, jegyezze fel a robot viselkedését, sebességét és azt, hogy a sugár leesik-e. Jegyezze fel, hogyan változnak a sebességek a projekt minden egyes tesztelésekor.
![]() Tanári eszköztár
-
Iteratív tervezés
Tanári eszköztár
-
Iteratív tervezés
Ez a tevékenység arra összpontosít, hogy felkérje a diákokat, hogy vegyenek részt egy iteratív tervezési folyamatban. A tanulókat megkérjük, hogy teszteljék projektjüket, mielőtt változtatásokat hajtanak végre. Ösztönözze a tanulókat a teljes tervezésre, tesztelésre, a visszajelzések alapján történő változtatásokra és ismételt tesztelésre. A sebesség beállításainak a tesztek eredményein és/vagy a többi csoporttag visszajelzésén kell alapulniuk. Ösztönözze a tanulókat, hogy kövessék az iteratív tervezési folyamatot ahelyett, hogy csak találgatnának és ellenőriznének, hogy levonják a következtetést, melyik sebesség a legjobb. A legjobb sebesség biztosítja, hogy a robotpincér ne öntsön ki semmit.
Az iteratív tervezés fontos tervezési módszertan a robotikában, valamint más mérnöki tervezési folyamatokban.
A tanulók az absztrakt érvelést is gyakorolják, miközben eldöntik, hogyan állítsák be a sebességet, hogy megállapítsák, melyik a legjobb.
![]() Tanári eszköztár
-
Emlékeztetők és megoldások
Tanári eszköztár
-
Emlékeztetők és megoldások
-
A tanár korlátozhatja a távolságot, ha a hely korlátozott.
-
A tanulóknak csoportjaikban kell dolgozniuk egyéni szerepükkel.
-
A Buildernek ellenőriznie kell, hogy a robot felkészült-e a projekt futtatására, és hogy a 6x Pitch Standoff megfelelően van-e elhelyezve az agyon lévő VEX IQ matricán, minden sebességmérés előtt.

-
A programozónak el kell végeznie a változtatásokat az utasításoknak megfelelően.
-
Az operátornak kell futtatnia a projekteket a roboton.
-
A felvevőnek dokumentálnia kell munkájukat és eredményeiket a mérnöki jegyzetfüzetükben.
-
Kérje meg a tanulókat, hogy jelentkezzenek be, amikor befejezték ezt a tevékenységet, és jelenítsék meg vagy futtassák projektje(ke)t.
A Robot Waiter megoldásához kattintson az alábbi hivatkozások egyikére (Google Doc/.docx/.pdf)