
Remixez votre projet
![]() Conseils à l'enseignant
Conseils à l'enseignant
Les étudiants peuvent se référer aux tutoriels s'ils ont des problèmes pour créer, renommer ou enregistrer un projet. Promenez-vous et surveillez les élèves pour vous assurer qu'ils terminent toutes les étapes.
Le programmeur doit suivre les étapes suivantes :

- Ouvrez le menu Fichier.
- Sélectionnez Ouvrir les exemples.
- Sélectionnez et ouvrez le modèle de pilote automatique.
- Nommez votre projet Velocity Remix.
- Enregistrez votre projet.
![]() Boîte à outils de l'enseignant
-
Comportements
Boîte à outils de l'enseignant
-
Comportements
Comme mentionné précédemment, les comportements sont un moyen de parler des actions du
robot. Une façon d'amener les élèves à réfléchir aux comportements et à organiser les
actions dans une séquence consiste à demander aux élèves d'étiqueter différentes parties
de leur projet à l'aide du bloc [commentaire]. Les élèves peuvent étiqueter les
différents comportements des défis tout au long du projet. Pour plus d'informations sur
l'utilisation du bloc [commentaire], utilisez l' aide.
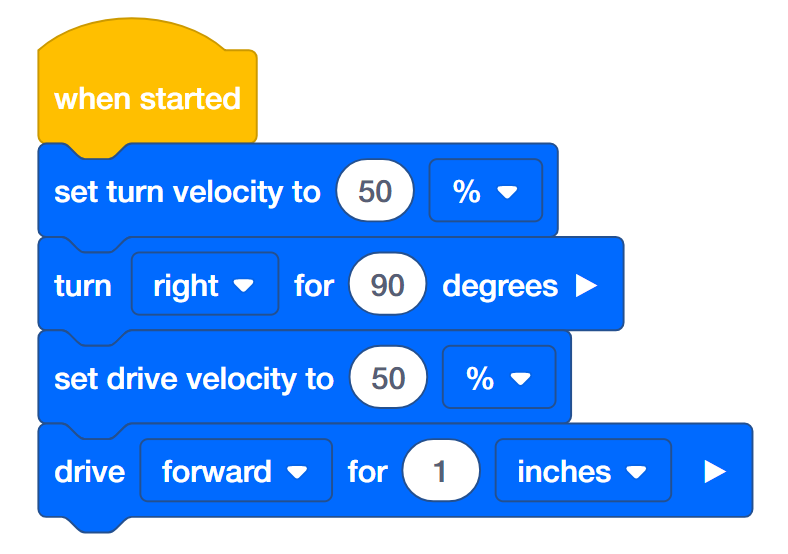
Dans le Tag You' re It ! défi, les élèves sont
invités à programmer le pilote automatique pour qu'il tourne rapidement pour éviter
d'être étiqueté, à conduire lentement pour étiqueter quelqu'un, puis à tourner
rapidement à nouveau pour s'enfuir. Consultez l'exemple ci-dessous d'utilisation
du bloc de commentaires pour décrire la séquence de comportements :

Vous pouvez également demander aux élèves d'expliquer comment ils vont planifier ces défis en termes de comportement souhaité et attendu du robot.
Tag You' re It !
Tournez vite, conduisez lentement, tournez vite pour jouer une partie de tag !
-
Le robot veut jouer à un jeu de tag,c'est tout ! Programmeur, utilisez les blocs [set Turn Velocity], [Turn for], [set Drive Velocity] et [Drive for] pour programmer le pilote automatique à tourner rapidement pour éviter d'être étiqueté, conduisez lentement pour étiqueter quelqu'un, puis tournez rapidement à nouveau pour vous enfuir ! Le pourcentage de vitesse pour tourner doit être au moins deux fois plus élevé que le pourcentage de vitesse pour conduire. Le projet ci-dessous est démarré mais incomplet. Il a besoin de plus de blocs et de vitesses définies.
- Programmeur, enregistrez le projet Tag et téléchargez-le dans le cerveau.
- Opérateur, exécutez le projet Tag.
- Le robot tourne-t-il rapidement, roule-t-il lentement, puis tourne-t-il à nouveau rapidement ?
- Enregistreur, prenez des notes sur le comportement du robot.
Défi bonus : Demandez au pilote automatique de jouer un son une fois qu'il a marqué quelqu'un !
![]() Boîte à outils pour les enseignants
-
Rappels et solutions
Boîte à outils pour les enseignants
-
Rappels et solutions
-
Installez un objet fixe tel qu'un livre que le robot marquera pour imiter le marquage d'une personne.
-
L'enseignant peut limiter les distances de conduite si l'espace est limité.
-
Les élèves devraient travailler dans leurs groupes avec leurs rôles individuels.
-
Le constructeur doit vérifier que le robot est prêt à exécuter le projet.
-
Le programmeur doit effectuer les modifications comme indiqué.
-
L'opérateur doit exécuter les projets sur le robot.
-
L'enregistreur doit documenter son travail et ses résultats dans ses cahiers d'ingénierie.
-
Demandez aux élèves de s'enregistrer lorsqu'ils ont terminé cette activité et d'afficher ou d'exécuter leur (s) projet(s).
Pour la solution Tag You' re It !, cliquez sur l'un des liens suivants (Google Doc/.docx/.pdf).
Protégez le château !
Déplacez-vous sur une place pour protéger le château des intrus !
-
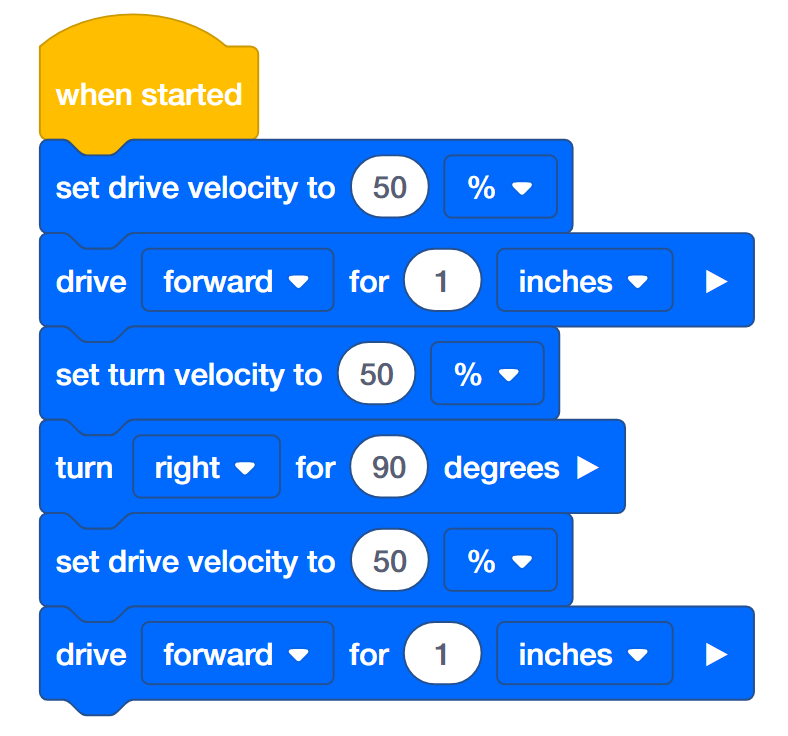
Votre roi vous a demandé de protéger le château ! Vous devez faire le tour du château carré pour vous assurer qu'il est à l'abri des intrus ! Programmateur, utilisez la vitesse de rotation définie, tournez pour, définissez la vitesse d'entraînement et conduisez pour que les blocs programment le pilote automatique pour qu'il se déplace dans un carré. Le pilote automatique doit rouler rapidement le long des côtés de la place, mais tourner lentement aux coins. Le projet ci-dessous est démarré mais incomplet. Il a besoin de plus de blocs et de vitesses définies.
- Programmeur, enregistrez le projet Castle et téléchargez-le dans le cerveau.
- Opérateur, lancez le projet Castle.
- Le robot se déplace-t-il rapidement en forme de carré mais tourne-t-il lentement aux coins ?
- Enregistreur, prenez des notes sur le comportement du robot.
Défis bonus :
- Demandez à la LED tactile du pilote automatique d'afficher une couleur différente pendant qu'elle roule de chaque côté de la place.
- Le périmètre du château carré qui doit être gardé est de 20 pouces. Programmer le robot pour qu'il se déplace autour du périmètre.
- La superficie du château carré qui doit être gardée est de 49 pouces. Calculez la longueur de chaque côté et déplacez-vous dans un carré qui couvre la zone.
![]() Boîte à outils pour les enseignants
-
Rappels et solutions
Boîte à outils pour les enseignants
-
Rappels et solutions
-
L'enseignant peut limiter les distances de conduite si l'espace est limité.
-
Les élèves devraient travailler dans leurs groupes avec leurs rôles individuels.
-
Le constructeur doit vérifier que le robot est prêt à exécuter le projet.
-
Le programmeur doit effectuer les modifications comme indiqué.
-
L'opérateur doit exécuter les projets sur le robot.
-
L'enregistreur doit documenter son travail et ses résultats dans ses cahiers d'ingénierie.
-
Demandez aux élèves de s'enregistrer lorsqu'ils ont terminé cette activité et d'afficher ou d'exécuter leur (s) projet(s).
Pour les solutions pour Protéger le Château !, cliquez sur l' un des liens suivants (Google Doc/.docx/.pdf).
Serveur robot
Ne renversez pas les boissons !
-
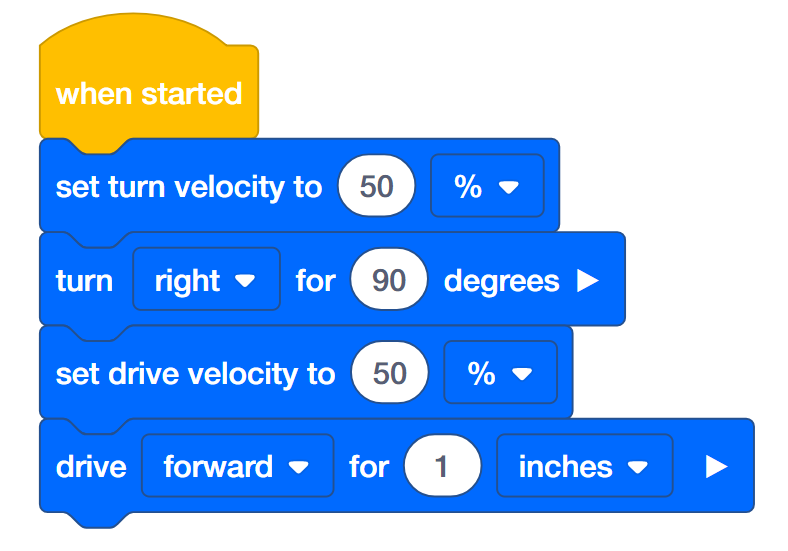
Votre robot s'entraîne pour devenir serveur dans un nouveau restaurant en ville. Programmer le robot serveur pour qu'il puisse se déplacer rapidement sans renverser ce qu'il transporte ! Utilisez le 6x Pitch Standoff pour simuler la nourriture ou les boissons que le serveur transporterait. Programmateur, utilisez la vitesse de virage définie, tournez pour, définissez la vitesse d'entraînement et conduisez pour que des blocs programment le pilote automatique pour qu'il tourne à 360 degrés et conduise 12 pouces aussi rapidement que possible tout en équilibrant une distance de pas 6x sur le cerveau du pilote automatique. Le projet ci-dessous est démarré mais incomplet. Il doit avoir les vitesses et les distances définies.
-
Constructeur, posez une entretoise de pas 6x à partir du kit de QI VEX à travers l'endroit où le QI VEX est écrit sur le cerveau.

- Programmateur, réglez les vitesses et les distances. Enregistrez ensuite le projet Robot Waiter et téléchargez-le dans le cerveau.
- Opérateur, exécutez le projet Robot Serveur.
- Le robot tourne-t-il et conduit-il tout en gardant le faisceau au-dessus du cerveau ? À quelle vitesse le robot peut-il se déplacer avant que le faisceau ne glisse ?
- Programmeur, testez des vitesses de plus en plus rapides jusqu'à ce que vous trouviez la limite. La limite de virage peut être différente de la limite de conduite. Utilisez les informations de l'enregistreur afin de prendre des décisions sur la vitesse qui est le meilleur choix.
- Enregistreur, prenez des notes sur le comportement du robot, sa vitesse et si le faisceau tombe. Notez comment les vitesses changent chaque fois que le projet est testé.
![]() Boîte à outils de l'enseignant
- Conception
itérative
Boîte à outils de l'enseignant
- Conception
itérative
Cette activité consiste à demander aux élèves de s'engager dans un processus de
conception itératif. Les étudiants sont invités à tester leurs projets avant d'apporter
des modifications. Encouragez les élèves à concevoir, tester, apporter des changements
en fonction des commentaires et tester à nouveau. Les ajustements de la vitesse doivent
être basés sur les résultats des tests et/ou les commentaires des autres membres du
groupe. Encouragez les élèves à suivre le processus de conception itératif au lieu de
simplement deviner et vérifier pour arriver à une conclusion quant à la vitesse qui est
la meilleure. La meilleure vitesse garantira que le robot serveur ne renverse rien.
La conception itérative est une méthodologie de conception importante en robotique ainsi
que dans d'autres processus de conception technique.
Les élèves pratiqueront également le raisonnement de manière abstraite tout en décidant comment ajuster la vélocité pour conclure lequel est le meilleur.
![]() Boîte à outils pour les enseignants
-
Rappels et solutions
Boîte à outils pour les enseignants
-
Rappels et solutions
- L'enseignant peut limiter les distances de conduite si l'espace est limité.
- Les élèves devraient travailler dans leurs groupes avec leurs rôles individuels.
-
Le constructeur doit vérifier que le robot est prêt à exécuter le projet et que le 6x Pitch Standoff est correctement positionné sur l'autocollant VEX IQ sur le cerveau avant chaque test de la vitesse.

- Le programmeur doit effectuer les modifications comme indiqué.
- L'opérateur doit exécuter les projets sur le robot.
- L'enregistreur doit documenter son travail et ses résultats dans ses cahiers d'ingénierie.
-
Demandez aux élèves de s'enregistrer lorsqu'ils ont terminé cette activité et d'afficher
ou d'exécuter leur (s) projet(s).
Pour la solution Robot Waiter, cliquez
sur l'un des liens suivants (Google
Doc/.docx/.pdf)