
รีมิกซ์โปรเจกต์ของ
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
นักเรียนสามารถดูบทช่วยสอนได้หากมีปัญหาในการสร้างเปลี่ยนชื่อหรือบันทึกโครงการ เดินไปรอบๆและตรวจสอบนักเรียนเพื่อให้แน่ใจว่าพวกเขาทำทุกขั้นตอนเสร็จสมบูรณ์
โปรแกรมเมอร์ควรทำตามขั้นตอนต่อไปนี้:

- เปิด เมนูไฟล์
- เลือกตัวอย่าง แบบเปิด
- เลือกและเปิดเท มเพลตระบบขับเคลื่อนอัตโนมัติ
- ตั้งชื่อโปรเจกต์ Velocity Remix ของคุณ
- บันทึกโปรเจกต์ของ คุณ
![]() กล่องเครื่องมือครู
-
พฤติกรรม
กล่องเครื่องมือครู
-
พฤติกรรม
ดังที่ได้กล่าวไว้ก่อนหน้านี้พฤติกรรมเป็นวิธีที่จะพูดคุยเกี่ยวกับการกระทำของหุ่นยนต์
วิธีหนึ่งที่จะทำให้นักเรียนคิดเกี่ยวกับพฤติกรรมและจัดระเบียบการดำเนินการตามลำดับคือให้นักเรียนติดป้ายกำกับส่วนต่างๆของโครงการโดยใช้ บล็อก
[comment] นักเรียนสามารถระบุพฤติกรรมที่แตกต่างจากความท้าทายตลอดทั้งโครงการ
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการใช้ บล็อก [comment]
ให้ใช้
ความ ช่วยเหลือในแท็ก You're It!
ความท้าทายขอให้นักเรียนตั้งโปรแกรม Autopilot
ให้เลี้ยวอย่างรวดเร็วเพื่อหลีกเลี่ยงการถูกแท็กขับช้าๆเพื่อติดแท็กใครบางคนแล้วเลี้ยวอย่างรวดเร็วอีกครั้งเพื่อวิ่งหนี
ดูตัวอย่างด้านล่างของการใช้ บล็อก ความคิดเห็นเพื่ออธิบายลำดับของพฤติกรรม:

ท่านอาจขอให้นักเรียนอธิบายว่าพวกเขาจะวางแผนรับมือกับความท้าทายเหล่านี้อย่างไรในแง่ของความต้องการและคาดหวังให้หุ่นยนต์ทำงานอย่างไร
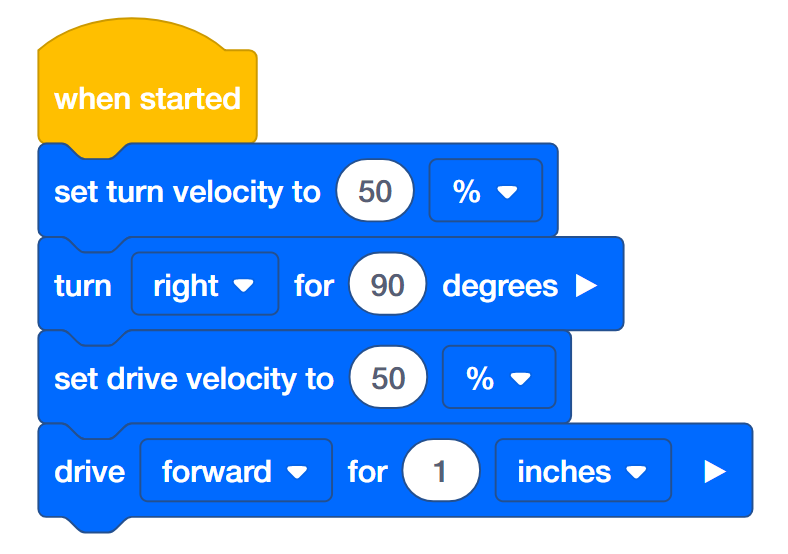
Tag You're It!
เลี้ยวอย่างรวดเร็วขับอย่างช้าๆเลี้ยวอย่างรวดเร็วเพื่อเล่นเกมแท็ก!
-
หุ่นยนต์ต้องการที่จะเล่นเกมของแท็ก - คุณมัน! โปรแกรมเมอร์ใช้บล็อก [set turn velocity], [turn for], [set drive velocity] และ [drive for] เพื่อตั้งโปรแกรม Autopilot ให้หมุนอย่างรวดเร็วเพื่อหลีกเลี่ยงการถูกแท็กขับช้าๆเพื่อติดแท็กใครบางคนแล้วหมุนอย่างรวดเร็วอีกครั้งเพื่อวิ่งหนี! เปอร์เซ็นต์ความเร็วสำหรับการหมุนควรสูงกว่าเปอร์เซ็นต์ความเร็วสำหรับการขับขี่อย่างน้อยสองเท่า โปรเจกต์ด้านล่างเริ่มต้นแล้วแต่ยังไม่เสร็จสมบูรณ์ มันต้องการบล็อกและตั้งค่าความเร็วมากขึ้น
- โปรแกรมเมอร์บันทึก โครงการแท็ก และ ดาวน์โหล ดไปยังสมอง
- ผู้ปฏิบัติ งาน เรียก ใช้โครงการแท็ก
- หุ่นยนต์หมุนอย่างรวดเร็วขับช้าๆแล้วหมุนอย่างรวดเร็วอีกครั้งหรือไม่?
- บันทึกจดบันทึกเกี่ยวกับพฤติกรรมของหุ่นยนต์
ความท้าทายโบนัส: ให้ระบบขับเคลื่อนอัตโนมัติเล่นเสียงเมื่อมันแท็กใครบางคน!
![]() กล่องเครื่องมือครู
-
การแจ้งเตือนและการแก้ปัญหา
กล่องเครื่องมือครู
-
การแจ้งเตือนและการแก้ปัญหา
-
ตั้งค่าวัตถุที่อยู่กับที่เช่นหนังสือที่หุ่นยนต์จะติดแท็กเพื่อเลียนแบบการติดแท็กบุคคล
-
ครูสามารถจำกัดระยะทางของไดรฟ์ได้หากมีพื้นที่จำกัด
-
นักเรียนควรทำงานเป็นกลุ่มตามบทบาทของแต่ละคน
-
ผู้สร้างควรตรวจสอบว่าหุ่นยนต์พร้อมที่จะดำเนินโครงการแล้ว
-
โปรแกรมเมอร์ควรทำการเปลี่ยนแปลงตามคำแนะนำ
-
ผู้ปฏิบัติงานควรดำเนินโครงการบนหุ่นยนต์
-
ผู้บันทึกควรบันทึกงานและผลลัพธ์ของพวกเขาไว้ในสมุดบันทึกวิศวกรรมของพวกเขา
-
ให้นักเรียนเช็คอินเมื่อพวกเขาทำกิจกรรมนี้เสร็จแล้วและแสดงหรือดำเนินโครงการของพวกเขา
สำหรับวิธีแก้ปัญหาแท็ก You're It! ให้คลิก ลิงก์ใดลิงก์หนึ่งต่อไปนี้(GoogleDoc/.docx/.pdf)
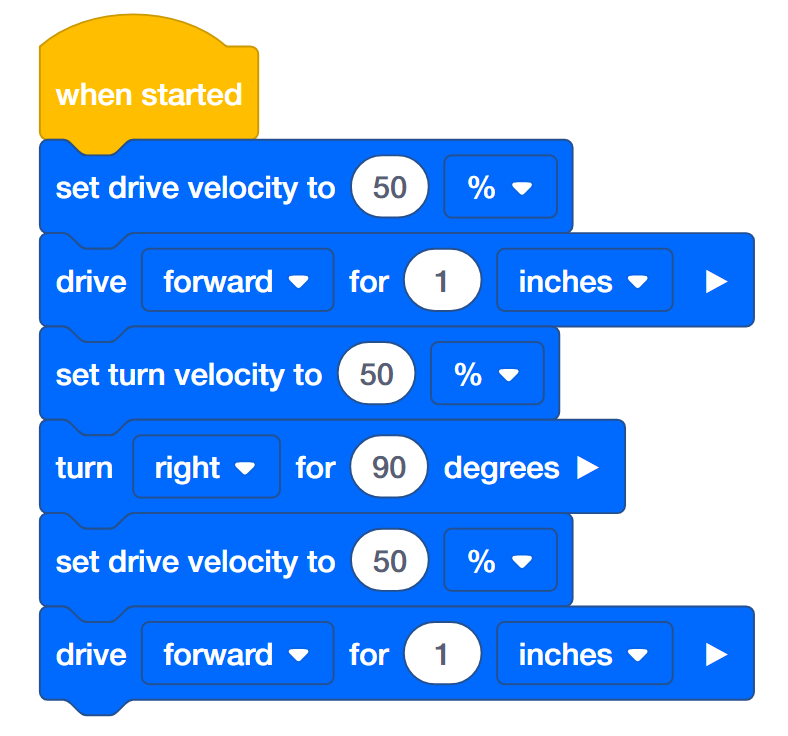
ปกป้องปราสาท!
เคลื่อนย้ายในจัตุรัสเพื่อปกป้องปราสาทจากผู้บุกรุก!
-
กษัตริย์ของคุณขอให้คุณปกป้องปราสาท! คุณต้องขับรถไปรอบๆปราสาทสี่เหลี่ยมเพื่อให้แน่ใจว่าปลอดภัยจากผู้บุกรุก! โปรแกรมเมอร์ใช้ความเร็วในการเลี้ยวที่ ตั้งไว้ หมุนหา ตั้งความเร็วในการ ขับเคลื่อนและขับเคลื่อน บล็อกเพื่อตั้งโปรแกรมให้ Autopilot เคลื่อนที่เป็นสี่เหลี่ยมจัตุรัส ระบบขับเคลื่อนอัตโนมัติควรขับไปตามด้านข้างของสี่เหลี่ยมจัตุรัสอย่างรวดเร็วแต่เลี้ยวช้าๆที่มุม โปรเจกต์ด้านล่างเริ่มต้นแล้วแต่ยังไม่เสร็จสมบูรณ์ มันต้องการบล็อกและตั้งค่าความเร็วมากขึ้น
- โปรแกรมเมอร์บันทึกโปรเจกต์ปราสาทและ ดาว น์โหลดไปที่สมอง
- โอเปอเรเตอร์ บริหาร โปรเจกต์คาสเซิล
- หุ่นยนต์เคลื่อนที่อย่างรวดเร็วในรูปทรงสี่เหลี่ยมจัตุรัสแต่หมุนช้าๆที่มุมหรือไม่?
- บันทึกจดบันทึกเกี่ยวกับพฤติกรรมของหุ่นยนต์
ความท้าทายโบนัส:
- ให้ไฟ LED ระบบสัมผัสของ Autopilot แสดงสีที่แตกต่างกันในขณะที่มันขับรถในแต่ละด้านของสี่เหลี่ยมจัตุรัส
- ขอบเขตของปราสาทสี่เหลี่ยมที่ต้องเฝ้าระวังคือ 20 นิ้ว ตั้งโปรแกรมให้หุ่นยนต์เคลื่อนที่ไปรอบๆเส้นรอบวง
- พื้นที่ของปราสาทสี่เหลี่ยมที่ต้องเฝ้าคือ 49 นิ้ว คำนวณความยาวของแต่ละด้านและย้ายในสี่เหลี่ยมที่ครอบคลุมพื้นที่ Calculate the length of each side and move in a square that covers the area.
![]() กล่องเครื่องมือครู
-
การแจ้งเตือนและการแก้ปัญหา
กล่องเครื่องมือครู
-
การแจ้งเตือนและการแก้ปัญหา
-
ครูสามารถจำกัดระยะทางของไดรฟ์ได้หากมีพื้นที่จำกัด
-
นักเรียนควรทำงานเป็นกลุ่มตามบทบาทของแต่ละคน
-
ผู้สร้างควรตรวจสอบว่าหุ่นยนต์พร้อมที่จะดำเนินโครงการแล้ว
-
โปรแกรมเมอร์ควรทำการเปลี่ยนแปลงตามคำแนะนำ
-
ผู้ปฏิบัติงานควรดำเนินโครงการบนหุ่นยนต์
-
ผู้บันทึกควรบันทึกงานและผลลัพธ์ของพวกเขาไว้ในสมุดบันทึกวิศวกรรมของพวกเขา
-
ให้นักเรียนเช็คอินเมื่อพวกเขาทำกิจกรรมนี้เสร็จแล้วและแสดงหรือดำเนินโครงการของพวกเขา
สำหรับโซลูชันเพื่อปกป้องปราสาท! ให้คลิก หนึ่งในลิงก์ต่อไปนี้(GoogleDoc/.docx/.pdf)
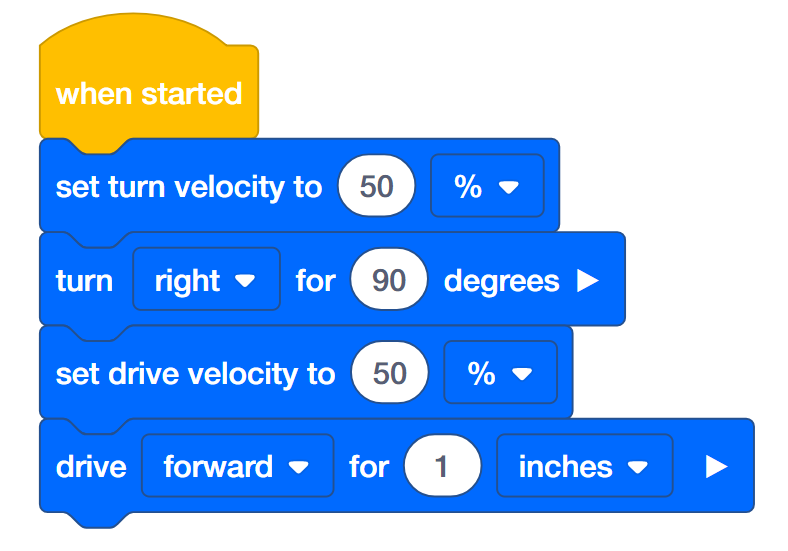
บริกรหุ่นยนต์
อย่าทำเครื่องดื่มหก!
-
หุ่นยนต์ของคุณกำลังฝึกเป็นบริกรที่ร้านอาหารใหม่ในเมือง ตั้งโปรแกรมบริกรหุ่นยนต์ให้สามารถเคลื่อนที่ได้อย่างรวดเร็วโดยไม่ทำให้สิ่งที่พกติดตัวหกเลอะเทอะ! ใช้ Pitch Standoff 6x เพื่อจำลองอาหารหรือเครื่องดื่มที่พนักงานเสิร์ฟจะถืออยู่ โปรแกรมเมอร์ใช้ความเร็วในการเลี้ยวที่ ตั้งไว้ หมุนสำหรับ ตั้งค่าความเร็วในการ ขับเคลื่อนและขับเคลื่อน บล็อกเพื่อตั้งโปรแกรม Autopilot ให้หมุน 360 องศาและขับ 12 นิ้วให้เร็วที่สุดเท่าที่จะเป็นไปได้ในขณะที่ปรับสมดุลขาตั้งสนาม 6x บนสมองของ Autopilot โปรเจกต์ด้านล่างเริ่มต้นแล้วแต่ยังไม่เสร็จสมบูรณ์ มันต้องมีความเร็วและระยะทางที่ตั้งไว้
-
Builder วาง Pitch Standoff 6x จาก vex IQ Kit ตรงข้ามที่เขียน vex IQ บนสมอง

- โปรแกรมเมอร์ตั้งค่าความเร็วและระยะทาง จากนั้นบันทึกโครงการบริกรหุ่นยนต์และ ดาวน์โหลดไปยังสมอง
- ผู้ปฏิบัติงาน เรียก ใช้โครงการบริกรหุ่นยนต์
- หุ่นยนต์จะหมุนและขับเคลื่อนในขณะที่ให้ลำแสงอยู่ด้านบนของสมองหรือไม่? หุ่นยนต์สามารถเคลื่อนที่ได้เร็วแค่ไหนก่อนที่ลำแสงจะเลื่อนออก?
- โปรแกรมเมอร์ทดสอบความเร็วที่เร็วขึ้นและเร็วขึ้นจนกว่าคุณจะพบขีดจำกัด ขีดจำกัดสำหรับการเลี้ยวอาจแตกต่างจากขีดจำกัดสำหรับการขับขี่ ใช้ข้อมูลจากผู้บันทึกเพื่อตัดสินใจว่าความเร็วใดเป็นตัวเลือกที่ดีที่สุด
- เครื่องบันทึกจดบันทึกเกี่ยวกับพฤติกรรมของหุ่นยนต์ความเร็วของมันและลำแสงตกหรือไม่ โปรดทราบว่าความเร็วมีการเปลี่ยนแปลงอย่างไรในแต่ละครั้งที่มีการทดสอบโครงการ
![]() กล่องเครื่องมือครู
- การ
ออกแบบซ้ำซ้อน
กล่องเครื่องมือครู
- การ
ออกแบบซ้ำซ้อน
กิจกรรมนี้มุ่งเน้นไปที่การขอให้นักเรียนมีส่วนร่วมในกระบวนการออกแบบซ้ำๆ
ขอให้นักเรียนทดสอบโครงการของตนก่อนทำการเปลี่ยนแปลง
กระตุ้นให้นักเรียนออกแบบทดสอบทำการเปลี่ยนแปลงตามข้อเสนอแนะและทดสอบอีกครั้งอย่างเต็มที่
การปรับความเร็วควรขึ้นอยู่กับผลการทดสอบและ/หรือข้อเสนอแนะจากสมาชิกในกลุ่มคนอื่นๆ
กระตุ้นให้นักเรียนทำตามขั้นตอนการออกแบบซ้ำๆแทนการคาดเดาและตรวจสอบเพื่อหาข้อสรุปว่าความเร็วใดดีที่สุด
ความเร็วที่ดีที่สุดจะช่วยให้มั่นใจได้ว่าบริกรหุ่นยนต์จะไม่ทำอะไร
หกเลอะเทอะการออกแบบซ้ำซ้อนเป็นวิธีการออกแบบที่สำคัญในหุ่นยนต์เช่นเดียวกับกระบวนการออกแบบทางวิศวกรรมอื่นๆ
นักเรียนจะได้ฝึกการให้เหตุผลอย่างเป็นนามธรรมในขณะที่ตัดสินใจว่าจะปรับความเร็วอย่างไรเพื่อสรุปว่าอันไหนดีที่สุด
![]() กล่องเครื่องมือครู
-
การแจ้งเตือนและการแก้ปัญหา
กล่องเครื่องมือครู
-
การแจ้งเตือนและการแก้ปัญหา
- ครูสามารถจำกัดระยะทางของไดรฟ์ได้หากมีพื้นที่จำกัด
- นักเรียนควรทำงานเป็นกลุ่มตามบทบาทของแต่ละคน
-
Builder ควรตรวจสอบว่าหุ่นยนต์เตรียมพร้อมที่จะรันโครงการและ 6x Pitch Standoff อยู่ในตำแหน่งที่เหมาะสมเหนือสติ๊กเกอร์ vex IQ บนสมองก่อนการทดสอบความเร็วแต่ละครั้ง

- โปรแกรมเมอร์ควรทำการเปลี่ยนแปลงตามคำแนะนำ
- ผู้ปฏิบัติงานควรดำเนินโครงการบนหุ่นยนต์
- ผู้บันทึกควรบันทึกงานและผลลัพธ์ของพวกเขาไว้ในสมุดบันทึกวิศวกรรมของพวกเขา
-
ให้นักเรียนเช็คอินเมื่อพวกเขาทำกิจกรรมนี้เสร็จแล้วและแสดงหรือดำเนินโครงการของพวกเขา
สำหรับวิธีแก้ปัญหาบริกรหุ่นยนต์ให้คลิ กลิงก์ใดลิงก์หนึ่งต่อไปนี้
(GoogleDoc/.docx/.pdf)